 |
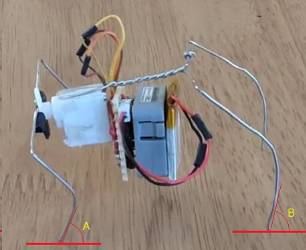
R4.12.20 トロット歩容というらしい
片山先生に教えていただいた。トロット歩容というらしい。ググったら沢山の研究者さんが研究している(^^;)
試行錯誤で動けたら良しと納得する!(^^;) AやBの角度で歩行が変わる。現在このロボ限定で両方とも85度程で動き良し。
|
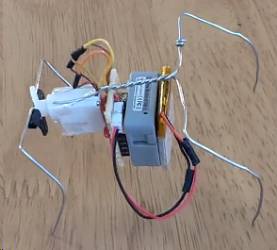
R4.12.14 歩いてるね(^^)
しかし、未だに前進する理由が不明(^^;)
R4.12.14 歩いてるね(^^)
おっ!完成したみたい。4脚の曲がり調整は必要だが、スケッチでの修正。サーボの中央から左右10度ほど回転。一気に
ledcWrite(srv_CH0, 4915 - 360);
delay(500);
ledcWrite(srv_CH0, 4915 + 360);
delay(500);
で改善(^^)/
 |
動きはこんな感じ。
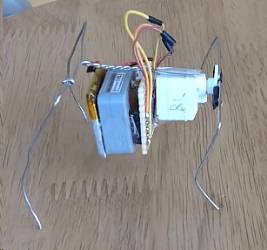
R4.12.14 歩いた?!
脚のしなりが重要なのではないかな? 16gと軽量なので、4脚それぞれ単線にしてみた。多少前に進んでる(^^;) しかし片山先生の4脚歩行のようには歩けない。
 |
動きはこんな感じ。
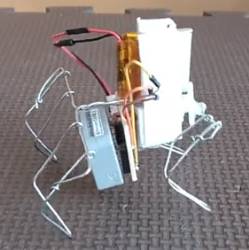
R4.12.13 M5Atomでトロット歩容
Dr.片山の100均ロボット研究室では、片山先生がたくさんの面白い歩行ロボットを開発されている。その中の一つに、4脚歩行のロボットに挑戦してみた。
構造は簡単なのだが、どうして歩くのかが分からない。頭が固いな(^^;)
 |
動きはこんな感じ。
