 |
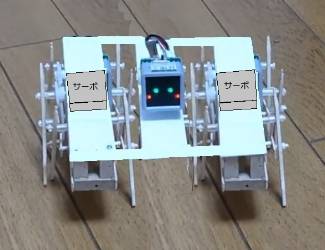
R4.12.4 完成しました!
ようやく動きました。ギヤが十分に固定されていないようで、歯とびしてる(^^;)
これまでに作ってきたサーボモーターを使った動くロボットと同じスケッチを使うことができるので、M5Atomを付け替えるだけで動き出すのはありがたい。
動きはこんな感じ。
|
同じものをもう一部作り、上の画像のようにすれば、右左折できて自由に動くことができそうだ。少々大きくなるな(^^;) 細身にできれば..... もう一部作るのも負担だけど(^^;)
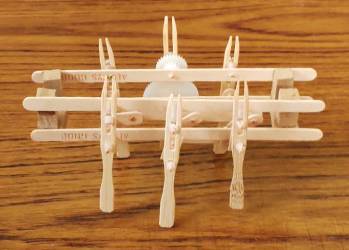
R4.12.1 ほぼ完成
脚がついた。両側の3脚が時に交差してしまう回転量を取ってしまったので多少ずらしてぶつからないようにしてみた。
 |
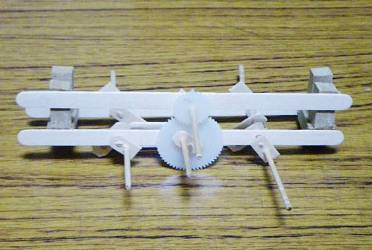
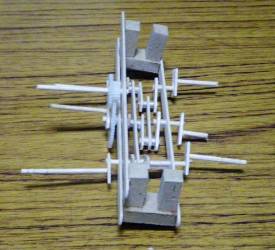
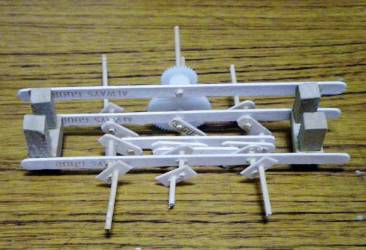
R4.11.27 姿が見えてきたな
だんだん組みあがってきた。一番目の画像に見える上のギヤに、サーボに取り付けたもう一つのギヤから動力を伝える予定。3番目の画像の4本の柱上にM5Atomとサーボ、バッテリーを配置する。うまく動くのかな?
 |
 |
 |
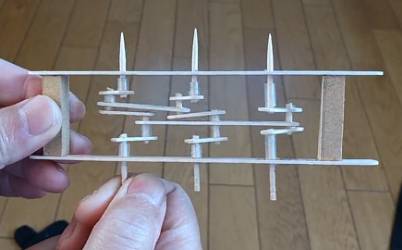
R4.11.27 なかなか良くなってきた
うまく動くようになってきた。動きはこんな感じ。小さいと精度の悪さが大きく動きに支障をきたすので、大きい方がいいのだろうな。
 |
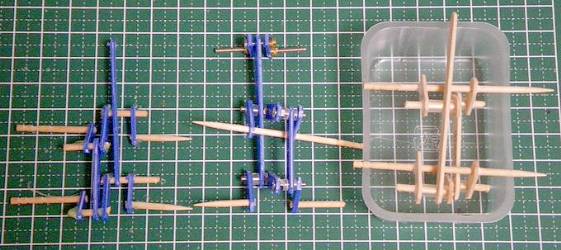
R4.11.23 数台作ってみた
いくつか作ってみると、だんだんと慣れてきて動きも良くなってくる(^^)
 |
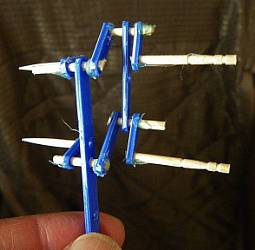
R4.11.21 M5Atomで片山先生の6脚歩行ロボット始まり
KlannLinkageで挫折したので(^^;)、「Dr.片山の100均ロボット研究室…6脚歩行ロボット」に挑戦。説明ビデオ見ても分からない(^^;) そういう時は作ってみる! 固定・回転の部分等、何となく分かってきた(^^) 精度悪いけど(^^;)
 |
