 |
 |
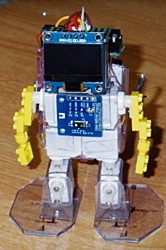
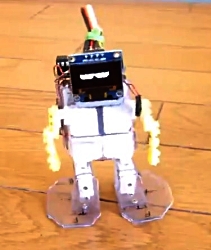
R4.2.17 スケーター
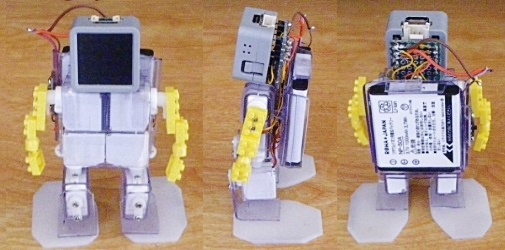
北京冬季オリンピックが始まっていて、選手は気持ちよく滑っています(^^) ならば2本足Atomにも滑ってもらいましょう(^^)/
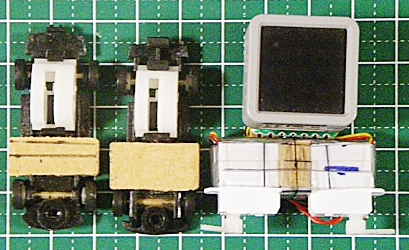
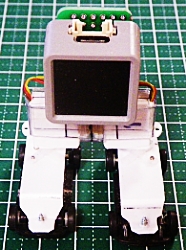
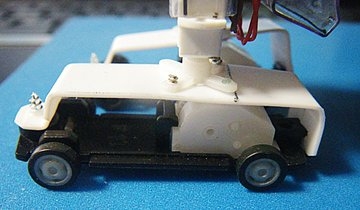
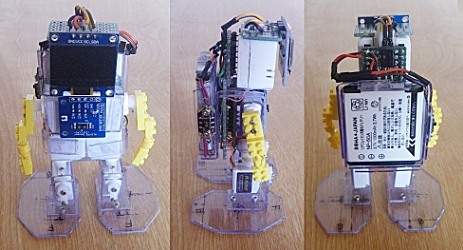
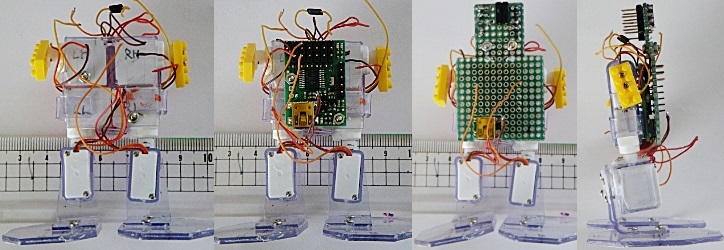
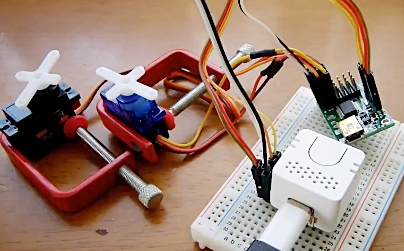
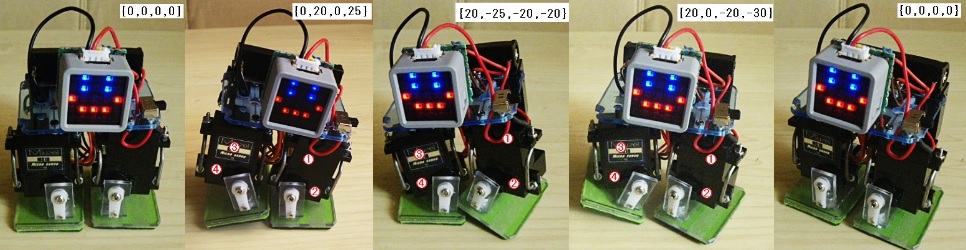
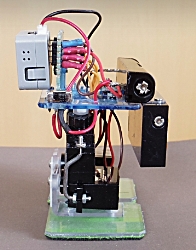
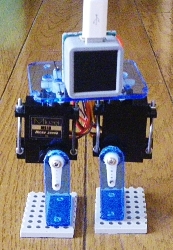
最初は、SG90級を考えていましたが、Atomには無理だったようなので、HK15318B級を使いました。考えていると、4つのサーボは必要なくて、2個で済むことに気が付きました。こんな感じですね。
|
|
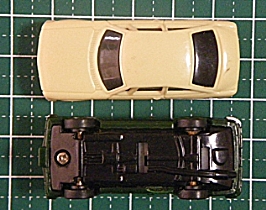
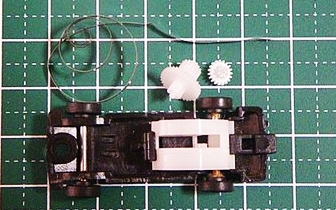
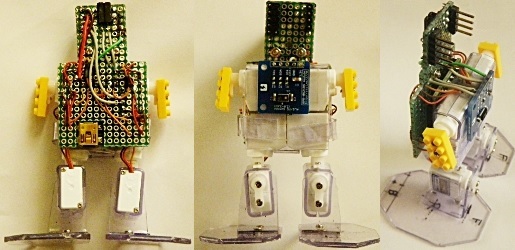
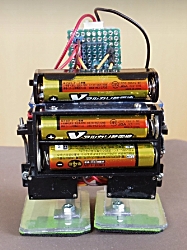
足元にはプルバックミニカーのシャーシを使用。最初、ゼンマイを取り去りフリーにしていましたが、ゼンマイをそのまま使った方が、後ろに下がらないことに気づき、そのままで使っています。これで、面倒なラチェット機構を作らなくてすみました(^^) この白い部分は規格があるのか、違う種類のプルバックカーを分解しても共通して使えるものがいくつかありました。有難い。
 |
 |
 |
M5StackのBLEを使ってコントロールもできるので、小さなトラックを作って走らせることもできるようです。
動きはここで
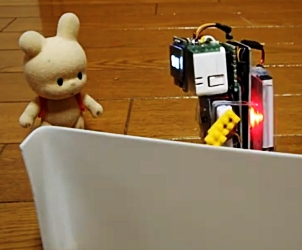
R3.6.11 ウォーリー
ウォーリーは作っている人(ushineko3さん)がいて、あんなに凄いものはできないけれど、ナンチャッテ風なものを目指します(^^;)
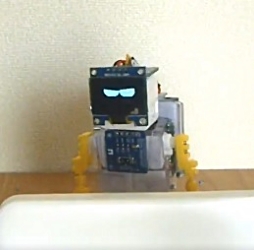
ポイントは、目玉の可愛さと三角型キャタピラーに立方体の体。
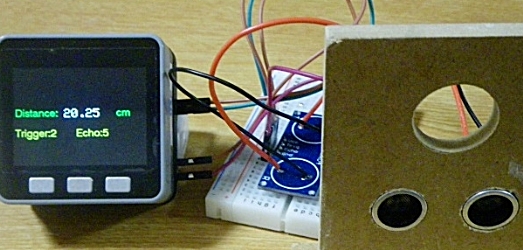
目玉は、距離センサーHC-SR04の送受信セットを取り外して似たように加工します。3V動作のもの。これがポイントなので、どうにか壊さないように外します。
 |
結果はうまくいったようですね。しかし、キャタピラーはあるけれど、その小型化とそれにつなぐ小型モーター調達で一旦停止中です(^^;)
R3.6.4 R2D2もどき(3)
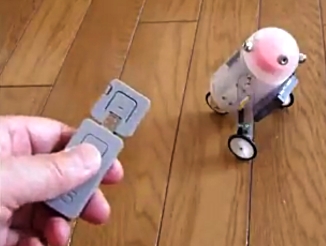
ジョイスティックで操縦するようにしてみましたが、バッテリーの問題か操縦者の問題か、いうことを聞いてくれません(^^;) 色でも塗って誤魔化すかな(^^;)
 |
動きはここで
コントローラをM5Stackに変更したら、M5AtomLite+ジョイスティックよりも操縦性がアップしました。BLEの扱いの差か、スケッチの書き方の違いかな?
動いているところを8か月の孫に見せたら、ジィ~~と見つめていました(^^) 不思議だったんですかね。
 |
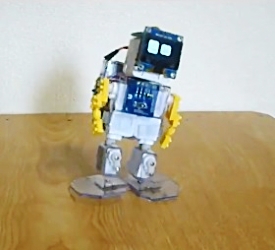
頭部を銀メタで塗装してみました。
R3.6.4 R2D2もどき(2)
手持ちの材料でとりあえず一応形を作ってみました。あとは配線のみ。バッテリーが検討課題。Matrixに顔かハートを表示しようかと...(^^;)
 |
本体の背中側にバッテリーが入るスペースがあるものの、バッテリー交換やスイッチの操作が便利なように背中に背負うことにしています。GPIOピンが余っているので、今後の拡張ができるように中の基板をスライド式にしてみました。バッテリーの問題がありますが、頭部をサーボモーターを使って回転させたり(GPIOピン1本消費)距離センサーを導入したり(Groveポート消費)できそうです。Echoを使えば、呟かせられますね。
 |
 |
実は、このあとDRV8835を基板に逆さまに配線してしまい、無理やり剥がそうとして壊したので(^^;) 再度注文。数日無駄にしました。
 |
動きはここで
R3.6.4 R2D2もどき(1)
二足歩行ではないけれど、ロボット風なものを作ります。R2D2ロボットを作っていらっしゃる方を見て、俄然意欲がわきました。以前から欲しいなと思っていましたので。ただ、年金暮らしの身では高価なので、なんちゃってR2D2を目指します(^^;)
持ち合わせの材料を使って作れないか計画。使わなくなったモータードライバが2種もあるけれど、M5Atomでは力不足かな?、GPIOピン不足かな?
 |
M5AtomMatrixとDRV8835で試してみたら、1個の小型モーターを1本のGPIOピンで動かすことができました。2個のモーターだと2本でOKです。それぞれ前進と停止で、後退はできないけれど(できないことはないけれど、さらに2本のGPIOピンを使うことになる)回転できるからいいかな。あと6本もGPIOピンが残ってる v(^^) echoでも喋らせながら動けるぞ!
ATOM LiteとMatrixをBLEでつなぎ、Matrixに接続したDRV8835で2つの小型DCモーターを回しています。LiteにジョイスティックをつないでMatrixのモーター制御ができますね。R2D2風ロボットが動きそうです。あとは工作ですが、塩ビ管では可哀想なので、百均で透明ボトルを探しました。
 |
動きはここで
R3.1.20 バッテリー問題
デジカメの3.7Vバッテリーを使っていましたが、充電してしばらくは調子よく動きますが、そのうち動きは止まります。faceやTalk、サーボコントローラのLEDは動作しますが。結局使えなくなるのですが、まだ本来のデジカメでは使えるのです。使いきってないわけですね。
そこで、7.4Vあたりのデジカメバッテリーを探しましたがなかなかいいものはありません。降圧モジュールで5Vに下げて使うかな?というわけです。これならかなり電圧が下降しても目一杯使えるかなと。今度は下がり過ぎが心配かな?
降圧モジュールは入手していたので、簡単な9V角型乾電池を使ってみました。ロボットは元気に動きました。しかし! 重い! 50gありました。
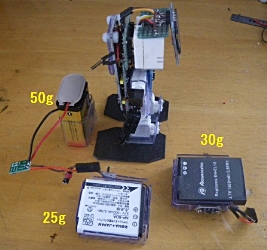 |
次に、充電式の9V電池を探し回った挙句、30gだよ! と教えてくれた人がありまして購入してみました。実測27g! 使える。早速スイッチを取り付けて背負わせてみました。バッテリーの厚みがあって重心が後ろになるけれど、そう傾きもせず元気に歩いてくれました。
 |
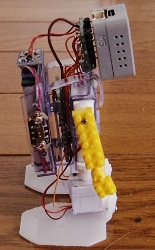
R2.12.9 ロボットの腕をプチブロックで
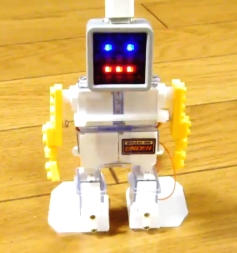
どこに行ってもロボットの腕になる部品を探していましたが、さば電子さんに教えていただいたDAISOのロボットプチブロックを近くのDAISOで発見(^^)/ さっそくmyロボットに装着すると、足元も黒にまとめてちょっぴり精悍に(^^;)なったかな?
 |
R2.12.4 BLEでコントロール
本当は音(口笛)で制御したかったのだけれど、無理だったみたいで諦めました。そこで、少々遊んでいるM5Stackに登場してもらいました。M5StackとECHOの間をBLEでつないでコントロールします。
ロボットは机の上で自由に歩き回るようにしますので、落下などの緊急時に制御することを考えました。PONDAさんのロボオプションズ「ESP32同士をBluetoothシリアルでつないでみる」を参考に、サンプルプログラムの若干の変更でコントロールできました。
 |
動きはここで
R2.12.1 音の解析2
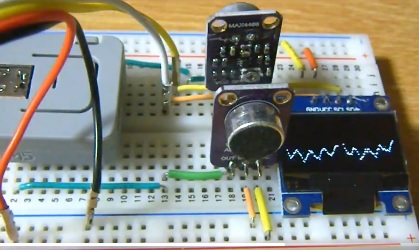
Ambientさんの「M5Stackで音を測る」の記事を参照させていただいて、マイクからの音の周波数成分を調べてみました。これもロボットの制御に使おうと思ってのことでしたが、なかなかアイデアが出ません。
口笛吹いて行動制御をしようと思っていたのですが、こんなに周波数の高い音は出せませんでした(^^;) 口笛ってそんなものなのね。
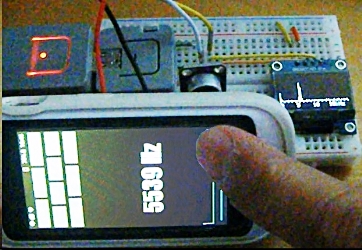 |
このコンデンサマイクは、感度がそう高くはないようで(?)10000Hzより高い音は聞きとってくれません。そりゃそうだ、あのでかい(直径1cm弱でしょうが)振動板を揺らせないでしょうね。
スマホにトーンジェネレイターをDLして、試したところ下のような結果を得ました。
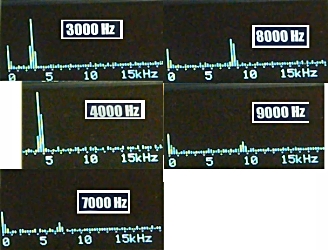 |
デジカメでビデオ撮影をしたのですが、デジカメも音を録音できない周波数がありました。それだけでなく、私自身8000Hzよりも高い音は聞こえなくなっていたのでした(^^;)
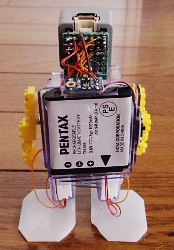
R2.11.29 バッテリーの種類を交換
容量の大きいバッテリーを見つけたので購入。円柱のリチウムイオン電池16340でも良かったんだけど、酸素ボンベ背負うのもいいかなと(^^) ただ、電池受けの接点をそのまま使いたかったので、カメラバッテリーにしたのでした。
 |
1.5倍になったので、余裕に使えるかな。重さは22g。
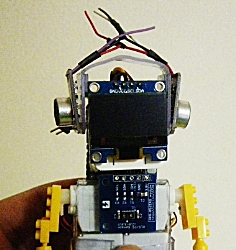
R2.11.27 ヘッドホンをしてみる
ロボットの動きは自律というか、ランダムに動き回るのがいいなと思っています。ただ、特別な行動をさせるのに音声でコントロールできたらいいなと、考えてみました。そこで、コンデンサマイク基板が3つもあるので、2つ取り付けてみました。
 |
Atom Liteでテストしてみましたが、これをどう利用するかはアイデアが浮かばない(^^;)
 |
因みに、25と33ピンに差した2つのマイクからのデータをSSD1306に表示して上のグラフを得ました。右側と左側ね。
R2.11.25 再々手術
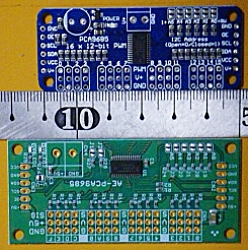
というわけで、ピンヘッダを60本ぬいたPCA9685搭載の16チャンネルサーボドライバーを使いました。このドライバーボードはHiLetgoの800円のもの。ヘッダを抜くために半田コテで何度も過熱したのにもかかわらず、元気に活躍しています。
ロボット本体にドライバーボードと結ぶための基板を下図右側のように作りました。ここに予めサーボからの信号線とVCC、GND線を配線しておきます。また、ドライバーボードのCH1からCH6までのサーボ受けホールにピンヘッダを半田付けし、そこにボードを差し込むようにしました。その後、半田付け。配線がうまくいっているように祈りながら。その後、右足の信号線がはずれたので、ドライバーボードの上側から半田付けしました(^^;)
 |
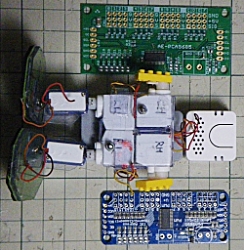
そして、下図がすべてを背負った様子。実は、スイッチサイエンスさん見たら、M5StickC 8Servos Hatという小型で8チャンネル、16340バッテリー付きのサーボコントローラがありました。今までも見ていたのだけれど、これにしようと思わなかったのは大きな失敗。これを使っていたら、まだ2CH使えたのに(^^;) 首振りに使えましたね。
でも、もうやらない手術は(^^;)
 |
そして今日、ようやくリハビリが終わり、一応これまでの動きはできるようになりました(^^)/ 流石にデジカメバッテリーでも安定して動いてくれています。もっとも、ここに来るまではいろんなエラーがありましたが(^^;)
動きはここで見ることができます。
 |
このロボットは、できるだけ人間がコントロールせずに、適当に乱数や自力で動くようにしようと考えています。ただ、声のコントロールはOKにしようと思ってはいます。ただ、ECHOはスピーカーとマイクが同時使用できないようなので、別仕立てでマイクを用意します。今回のドライバーボードはI2Cを使っているので、ECHOといえどもまだGPIOピンが余っています(^^)/ まあ、あれこれ使うと電流量が問題ですけど(^^;)
R2.11.21 再手術
やっぱりPololuのサーボコントローラでは電圧も電流も不足気味です。ほぼ完璧に動くのは、5V3A表示のあるACアダプタで加電したときだけ。それでも動作を早くすると、赤LEDがついて妙な動きをします。で、諦めました。
秋月電子通商に注文していた3V動作のサーボドライバが届いたのだけれど、分かってはいたけれど大きすぎました(^^;)。もう決心がついて、手持ちの3V動作ドライバのピンヘッダを60本抜きました(^^)/ (もうどうにでもなれ~モード)電解コンデンサなども!
 |
おお、それなりに小さいですね。これならば、本体とバッテリに挟めるでしょう。でも今度はI2Cが3つですね。アドレスはどうなっていたかな?
 |
アドレスは、どれも違うようで大丈夫のようです。
R2.11.19 一応動く
コロコロ変わるけれど、昇圧は必要なかった(^^)/ サーボに速さを求めなければ、3.7Vでも動くのでした。動作時間は今のところ不明(^^;) 行進掛け声「1・2」は「いち・ぬ」になってしまうので「ワン・ツー」で(^^;)
 |
動きはここで
3.7Vバッテリーで容量大きいもの(現在1000mAh)を探したら、1300mAhほどのものを発見。注文しました。届くまでは、5Vのモバイルバッテリーで試運転です。
3.7Vでダメならば、7.2Vくらいのカメラバッテリーを降圧モジュールを使ってやってみるかです。それでもだめならば、3Vで動く大きめのコントローラを使うかです。
R2.11.17 試歩行
どうにか上手いこと前進歩行だけはできました。AquesTalkもFacesも距離センサーもこれからです。声が出なかったのは、使いまわした基板に関係ない余分の半田が残っていて悪さしてました(^^;)
3.7Vのカメラバッテリーでは、サーボがおかしくなります。やっぱり5V~の仕様の通りですね。手持ちのPCA9685制御の12CHサーボコントローラは3Vで動くのに(^^;) 5Vモバイルバッテリーでは不可なく(^^)/ 昇圧モジュール使うかな?
 |
動きはここで
R2.11.16 新型の図
コントローラ基板からピンを抜きたかったけど、これまでの経験から失敗すると分かっていたのでやめた(^^;)
できるだけピンを短く切断し、ソケットは使わずに直に配線をしたので、コントローラはこのロボットと一心同体になった(^^;)
それでも、本体とバッテリーの間に違和感なく挟み込めたのは、良かった(^^)/
 |
途中の過程を見ると、下画像の左から、
 |
薄く配置できた。あとは、サーボの3種の線をピンに配線する。作業終了の図が下。左から、
 |
R2.11.13 6チャンネルサーボコントローラを使う
ここまでできたらもう少し工夫したい。ということで、取り敢えずMatrixを交代してLiteを使うつかうことにして購入。そして、以前見つけておいた小型のサーボコントローラも購入。
 |
サーボモーターを2つ使って動くかどうか試してみた。最終的にはECHOを使って喋りながら歩くことを考えているので、ECHOで試運転。このコントローラにもArduinoライブラリがあったので、なんなく動作した。
 |
動きはここで
このコントローラはソフトウェアシリアルで動かせるので、結局6つまでのサーボでも2本のGPIOしか使わない。それならECHOでも十分動かせるということだ。
あとは、半田付けで失敗しないように、これまでしたことのないような綿密さで、基板構成図を作成している?! φ(._.;)
R2.11.9 障害物を認識
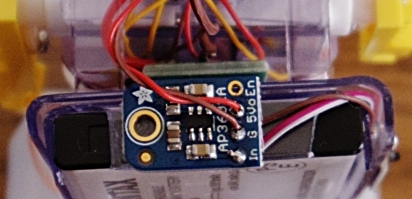
M5Atomロボットで使い尽くしたと思っていたGPIOピン、I2Cはアドレスさえ異なれば並列でいくつでも接続できるので試したところ上手くいったテスト。OLEDにFacesを表示して照度・近接一体型センサモジュールで感知することができました。
早速このセンサモジュールを2足歩行ロボットの胸につけて、簡単のために、障害物に近づくと一旦バックして、その後90度ほど右折するようにしてみました。
 |
歩く様子はここで。
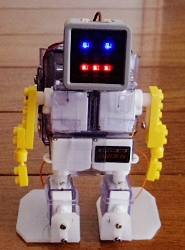
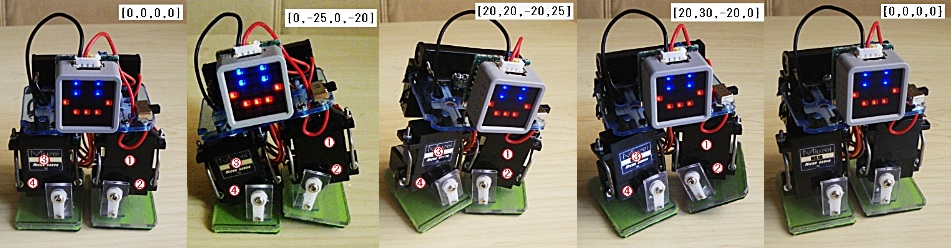
R2.11.5 ロボット表情を持つ
GroveAポートを距離センサーで使おうか考えていましたが、可愛い表情をするESP32_Facesというスケッチがあったので、それを採用することにしました。まずは、使えるかどうかテストです。それは、ECHOで実施しました。動作したので、ロボットの方に組み込んでみました。
表情は18種類あります。その一つ一つで、瞬きしたり右左向いたり画面の中で動いたりします。ところが、ロボットが動きだしてもすぐには表示されず、行動毎に設定したはずの表情がずれて表示されたりします。何より残念なのは、表情の中での瞬きなどの変化が見られなくなることでした。それでも、時に変化する表情はLEDとは違った楽しさがあります。もう少しincludeするファイルを吟味します。
 |
これで、GPIOピンは使いきってしまいました。サーボドライバボードを使うと、ピンが空くのですが、高価だからね。手持ちのものは本体並みに大きいので使う気がしないし。動きはここで見ることができます。
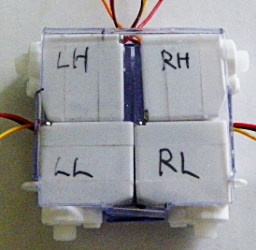
R2.10.25 ロボット歩行のシミュレーター
表題にするほどのものではないのですが、2足歩行させるときに4つのサーボモーターをどう動かすといいのか、頭の中でやっているとこんがらがってくるので、角材を切りだしてサーボを4つ作り、動かせるように組んでみました。
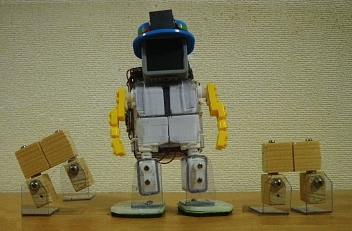 |
手持ちの角材が細すぎたので、上のようになってしまいましたが、それなりに理解しやすくなりました。ただ、ロボット本体の精度が良くないので、シミュレーター通りに行かないのは困ったものです(^^;)
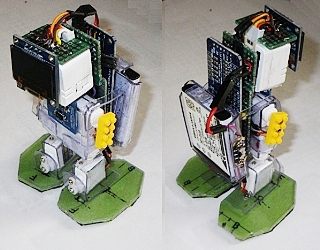
R2.10.18 ロボット復活
机の上でテスト歩行していたら、手から床に滑り落ちて破損してしまったので、大規模な手術を行いました。以前のものはあとからあとから必要なものを付け加えたことから、強度に不安がありました。今回はそれなりにがっちりと作りました。特に上4つのサーボモーターをひとまとめに胸ケースに入れてずれないようにしました。
 |
M5ATOMも肩の上に載せたので姿勢が良くなりました。配線も隠れるようにしたので見栄えが良くなり、電源と筐体が接近してバランス良くなりました。
 |
あとは、もう少し豊富な芸を仕込むことです。おっと、距離センサーとATP3011も組み込まなくては…
R2.10.13 ソフトウェアシリアル
M5Stackでソフトウェアシリアルが使えることが分かったのでやってみました。1年前にGPSユニットをGroveAで使おうと思ったけれど、ソフトウェアシリアルのライブラリに出会えなかったので頓挫していました。ArduinoのサイトにEspSoftwareSerialというのがあって、これを使えばいいのでした (^^)/ 大分前からあったようです(^^;)
AtomのGroveAでソフトウェアシリアルを使ってATP3011に喋らせることをしたいわけです。今はデモモードなので、電源を入れれば書き換えた10個ほどの文章を喋るようにしています。これを任意のタイミングで任意の言葉をしゃべるようにね。
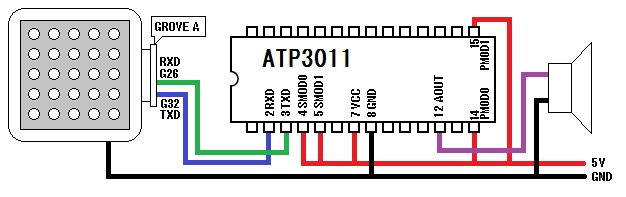
以前に購入していた2枚くっ付いて140円ほどのステレオアンプを使って、簡便なスピーカを作っておきました。下の写真。右下はM5Stackから取り去ったスピーカ。少々長いので、丸型のものを使いました。
 |
配線は、下記の通り。以前、マイクロビットで使ったのとは少々違います。4・5・14・15をVCCに接続してコマンド入力モード、UARTモードを指定しています。この指定をしなくてもマイクロビットでは喋ってくれたようですが、違ったかな?
ATP3011がギリギリ載る基板に配線して試してみましたが、前の晩に動いて喋ってくれたのに、翌日になったらウンともスンとも言わない。よくあることです(^^;) 結局ブレッドボードでやってみて、M5StackでもM5ATOMでも動いて喋ってくれました。基板の方は2か所半田が浮いてました(^^;) 両者ではGroveAのピンナンバー違いますけど。
しかし、M5ATOMでサーボモーターとソフトウェアシリアルを同時に使ってみると、動かないようです。どこかミスしているのかもしれませんが、追究はしません。このポートは距離センサーのために使うつもりですので。お喋りはデモモードで行きます。
 |
まあ、今回はソフトウェアシリアルが使えるということで満足しましょうか。
R2.10.8 細かい細工の記録
このようなものを作成するときには、ケースにするためのプラスチック板がポイントになります。3Dプリンターがあれば、それを使うのが一番でしょうが、高価過ぎて手に入りません。
これまでに試した中で最も良いと思えるものが硬質塩化ビニール板です。それなりに安価であり、ハサミで切れる柔らかさと基板や部品を支えるに十分な強度。さらに、アイロンの低温で柔らかくして加工できる柔軟性。
今回のM5ATOMによるロボットでは、全部これで本体を作っています。バッテリーを保持するケースもこの板を使ってランドセル風のものを作りました。
 |
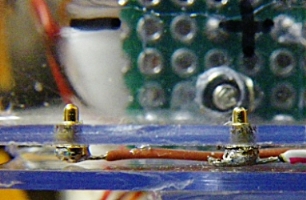
ポイントの二つ目。バッテリーとの接点です。下のようなものを大分前に注文して、最近入手しました。細かい縦線の間隔は1mmです。右側の砲弾様の先端がバネ仕掛けになっていてバッテリーの電極と接してくれます。
 |
上の部品を板に固定します。板にφ1.5mmの穴をあけて、電極を多少無理やり押し込んで固定します。電極の下の平らな部分に配線を半田付けし、さらに硬質塩化ビニール板でサンドして固定しました。
 |
R2.10.7 動いた!
ツイッターでrobotakaoさんからアドバイスをいただきました。昇圧せずにダイレクトに接続しても動くかもしれないということ。そこで、下の通り昇圧モジュールを外してみました。
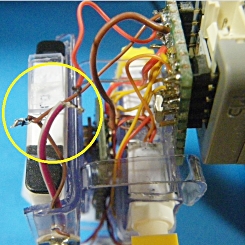 |
なんと、動きました。ここで見ることができます。
PentaxQ10で使っている3.7V 1000mAhのバッテリーでM5ATOMと小型サーボモーター6個を動かしています。どのくらいの時間動くのだろう?
R2.10.7 動かない(^^;)
スイッチサイエンスさんからスイッチと昇圧モジュールを購入しました。ところが、昇圧モジュールが5V最大100mAまででした。深く考えずに値段だけでいってしまった(^^;) 改めて300mAまで出力するモジュールを再注文しました。
 |
 |
 |
まあまあコンパクトになりました。カバーを作ればもっと恰好がいいんだけど、見えてもいいですね。
 |
 |
R2.10.5 腕が付いた
HPの更新をしていなかったけれど、ロボットは少しづつ成長しています。小さなサーボモーターが2つ残っていたので、腕振り用に試してみました。GPIOピンも2本余っていたので。下のような感じになりました。身長は9.5cm。腕は、百均の小さなブロックを利用しています。取りあえず上からの電源供給で動きます。ここで見ることができます
 |
今後はデジカメのバッテリーパックを背負って歩くように、現在鋭意作成中です(^o^)/
R2.9.30 ようやく落ち着く
以前購入していた小さなサーボモーターを使って2足歩行ロボットを作成しました。下の写真の右端がそれ。大分軽量になって33gでした。
 |
問題はバッテリーで、大きさからするとボタン電池での運用を考えました。LR44を使ったライトがあったので、それを使うことを考えたのでした。LR44は1.5Vで120mAh。単4電池だと900mAh、単3電池600mAhというデータからすると、難しいか?
 |
このライトはLR44が4個仕様だったので縮めて背負わせると下のようになりました。画面の顔は表示しましたが、動かず。そのうち、画面が全灯点灯してしまいました(^^;)
 |
そこで、背中のスペースを考慮して、単4電池3本で対応しました。相変わらず配線はゴチャゴチャですが、うまく収まりました。ここで見ることができます。直線前進のはずが、左回り気味です(^^;) 33gの本体に40gの電源で苦しいんでしょうね。
 |
R2.9.26 ようやく歩く
2本足で歩かせるにはいろいろな方法があるようですが、私の場合には次のようにしました。
①左に傾いた時には、右足が宙に浮くこと。
②右に傾いた時には、左足が宙に浮くこと。
そうすると、腰をひねると(上のサーボを回すと)宙に浮いた足が前に出ます。それから、両足を地面につける。次に、逆を行う。こうすれば、前進できる。
問題は、足を宙に浮かすこと。これを実現するために、下の図で説明します。覚書として。
 |
歩いている様子は、ここで見ることができます。
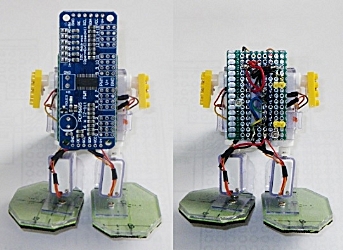
R2.9.22 もう一台のM5Atomロボ
PLEN2miniというロボットを見て、そのサーボモーターの配置を参考に、というか真似て(^^;) 2台目の2足歩行ロボットを計画しています。脚だけ作っていました。取りあえず手持ちの古いサーボで作ったのが下の画像。
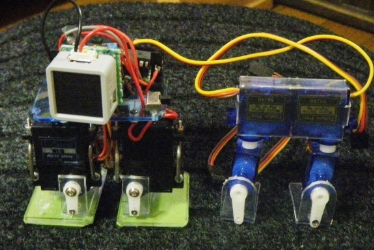 |
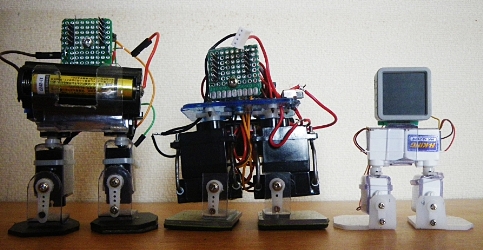
さらに配線するようにしたのが次の画像左側。右側はこれまでのロボット。少々スマートになりました。仮止めして、頭部はechoを代わりにつけています。
ただ、22日現在、この青色のサーボが不調なので、すべて別の手持ちのサーボに置き換える予定です。今、製作中。配線もスマートに行きたいと思案中。
 |
さらに、オークションで、とても小さなサーボモーターをゲットしました。6個も。これを使うのは3代目。
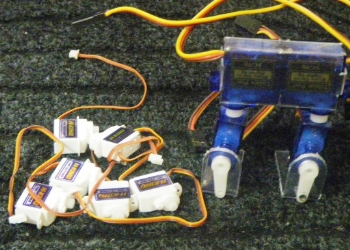 |
R2.9.19 一応動く
4つのサーボモーターを使って2足歩行させてみました。前進・後退・右転回・左転回・右スライド・左スライドでランダムに動きます。左右のバランスが悪いので、前進でも大きく右回りになってしまいます。そのおかげで、狭いところでも自由に歩かせることができます(^^;)
ここで見ることができます。
R2.9.11 左右の転回
だいたい前進・左転回・右転回ができるようになったので、これに静止を加えた4つの動きを乱数を使ってランダムに動くようにしました。気ままに動くって感じで。表情も変えてね。でも、やはり黙って動くのは物足りない。そこで、AquesTalk使って喋るようにしました。AquesTalk pico for ESP32を使うとなると(使えるのかな?)ライセンスが必要なので、手元にある2つもある(!)ATP3011というLSIで実現することにしました。ただ、AtomがSerial2を使えるか不明なので(試したけど無理だった)、プリセットメッセージを使います。これなら電源を入れれば喋ってくれます。さらに、Aquestさんが提供するPicoRomWriterで、自由にプリセットメッセージを書き換えられるので、これで喋らせればいいということで実現。ATP3011とソケットという最小限のセットを組んだ基板を背負わせました。
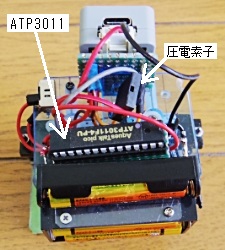 |
簡単にするためスピーカーとして圧電素子を使ったので、音量は小さいです。何を言っているのか分かりにくいのですが、それはそれでブツブツ喋っているということで良しとします。ここで見ることができます。
長いバージョンは、ここです。
R2.9.10 左右の転回
サーボモーターの動きを、就寝時頭の中でシミュレーションしているとよく眠れます(^^;) サーボの動きはなかなか把握しにくいものです。ホーンを付けたサーボの回転を見るときと、サーボ自身が回転する向きは当然反対になります。「ホーンは右回りに回っているな」と思っても「左に回しているんだけど」とサーボは認識しています。さらに、サーボを筐体に固定すると認識不能になってきます。サーボが「ホーンを右に回したんだけど」と思っていると、「あらら!」サーボ自身が左回転です。それを見ている人間たちは、「一体どう回したんだい?」。それが、左右の足に対照的に配置した2つのサーボの動きは? その上に載せた2つのサーボの動きは? 果てしなく続きそうな課題です(^^;)
一歩ずつ克服するべき課題です。あらかたできたら、理想を目指さず60%くらいの完成で満足します、売り物ではないので。でも、次に備えて記録しておきます。明日になれば忘れているので、きっと(^^;)
左転回の足運び。
 |
右転回の足運び。
 |
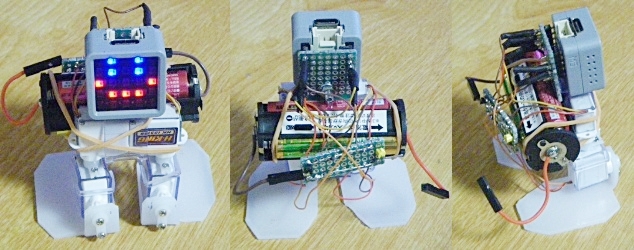
R2.9.9 改良ロボット
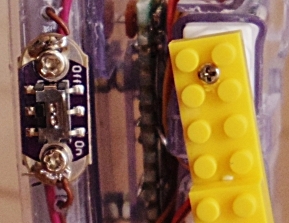
ということで、改良しました。単4電池を3本背負っています。これで、M5Atomとサーボモーター4台が動作します。足裏には、百均のマウスパッドを張り付けています。これ、滑り止めに調子いいです。
 |
 |
 |
 |
動いている様子は、ここで見ることができます。
R2.9.5 一応ロボット
なるべく小さな2足歩行のロボットを作ろうということで、作ってみました。
 |
これまでも2足歩行ロボットはマイクロビットとM5Stackでそれなりの(^^;)ものを作っているので、さらさらととてもアバウトに(^^;)作りました。
PLENプロジェクトなどの既製品だと精度が良くて、歩き方も素晴らしい!!ものなのですが、年金生活者には高価で手が出ない! ということで、ありあわせの材料での自作です。今回は、「M5Atomで小さい二足歩行ロボット…」というRoboTakaoさんの記事を見て「これだ!」という勢いでやっています。動かすためのスケッチもそのまま使わせていただいています(^^;) 有難うございます。
ただ、最初のうちはスケッチの内容が良くわかりませんでした。試行錯誤するうちに、ようやく分かってきました(^^)/
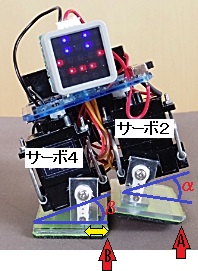
一番の問題点は、前進するときのサーボの動かし方。左右の脚にそれぞれ2個のサーボを使っています。下側のサーボで体を左右に倒して、上側のサーボで腰をひねって足を前に出すという動きを再現します。この時、体を右に倒そうとしても足だけが右に跳ね上がってしまうという結果になっていたのでした。これでは効果的に左脚を前に出しにくい。ここが問題点。
脚の長さを変えたり、湾曲させて重心位置を変えたりしましたが、結局次の2点でクリヤーしました。
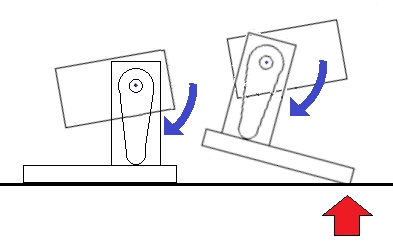 |
図中の赤矢印のように支えてやるわけです。図はアバウトですが、右足で10度傾けるなら、同じ10度左足を同じ方向に回転させてやるといい具合かと思います。この時、体全体は右足一本で立っており、左脚は地面を離れていることでしょう(^^)v。
R2.9.2 M5Atomがやってきた
だんだん増えていってしまうことは分かっていて控えていたのだけれど、ついポチッとしてしまいました。そんなに高くないからね、ということで(^^;)
 |
やっぱりアトムというだけあって、ロボットを作ろうかなと思います。
