 |
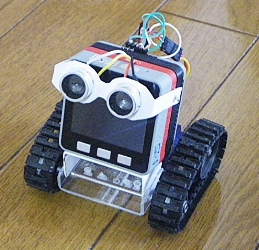
R4.11.12 M5Stackクローラーに眼鏡を付けてみた
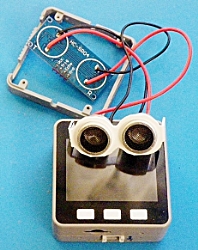
以前からHCSR04は眼鏡だよなと思っていたのでやってみた。特徴的にするために、HC-SR04から超音波送信機・受信機部分(?)を外した。
|
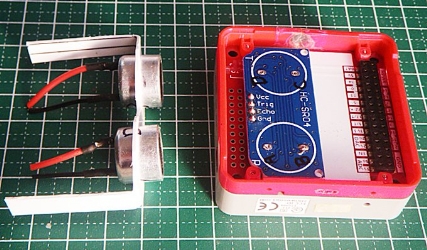
M5Stackにスタックするために材料箱の中の適当なものを使ってHC-SR04の基板を収納。
 |
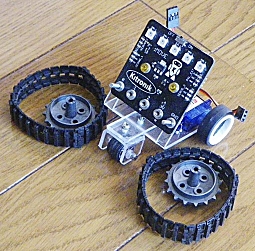
以前マイクロビットで走らせていた部品を流用して車体を作る。(^^)
 |
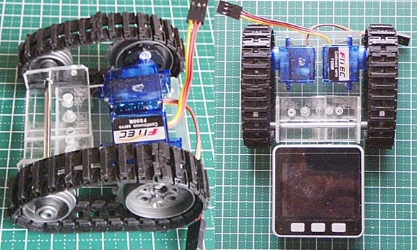 |
単純化の為に1mm厚ポリスチレンプレート(百均)を使って椅子型にする。それなりに安定している。背面に薄い鉄板を張り付けて、M5Stackの内部磁石を利用して固定しする。うっかりM5Stackを持ってしまうと分離するのが難点(^^;)
 |
FEETECHのFS90Rを使用。PWM周波数50Hz、PWM_levelを16bitにして、ledcWrite(srv_CH0, i);のiに4700μ秒から100μ秒毎に増加。回転後しばらくして停止、反転。この停止の時の秒数測定が目的。4900~5000μ秒ですね。座席をまだ固定していなかったので表示が見やすかった(^^;) 動きはここで
眼鏡を取り付ける。HC_SR04をTrigをGPIO2、EchoをGPIO5と接続。こんな感じ。
 |
動きはここで見れます
R1.12.25 コンパクトにしてみた
うまく動作したので、コンパクトに差し込み式にしてみました。相変わらずエイヤッとやってしまうので、完成したときには不都合もしばしばです(^^;) HCSR-04の右側がM5Stack本体よりも若干はみ出てしまいました。
 |
もう1つのHCSR-04は長いケーブルで接続しようと思ってます。
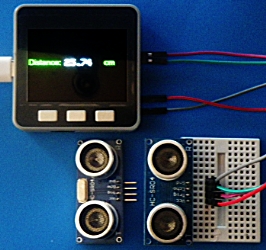
R1.12.24 HC-SR04という距離センサー
HC-SR04というセンサーが2つあります。左側のは5V、右側のは3Vくらいで動きます。低電圧対応ということで、マイクロビットで使うために調達しました。今回は、どちらでも動きました。M5Stackには5Vも3.3Vも出力しているからです。
 |
マイクロビットで動かしたときのことを振り返りながら、自分でスケッチを作ってみるべきでしたが(^^;)、ついネットにつながっていたPCを前にしていたので、チョチョッと「M5Stack HCSR04」で検索して発見したスケッチを書き込んでみましたが、どうもうまくいかなかったので、「Arduino HCSR04」と検索してみました。
とても見やすく理解しやすいスケッチがデバイスプラス hobbyの第16回記事にありましたので、それをM5Stackで動くように書き換えてみました。
上のように測定できました。いずれ、落下運動などを測定してみたいと思います。
