 |
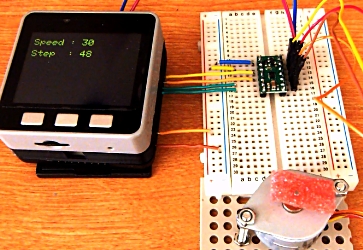
R6.8.25丂M5Capsule偱惎嵗憗尒斦
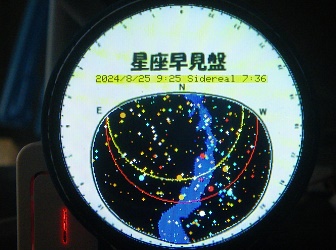
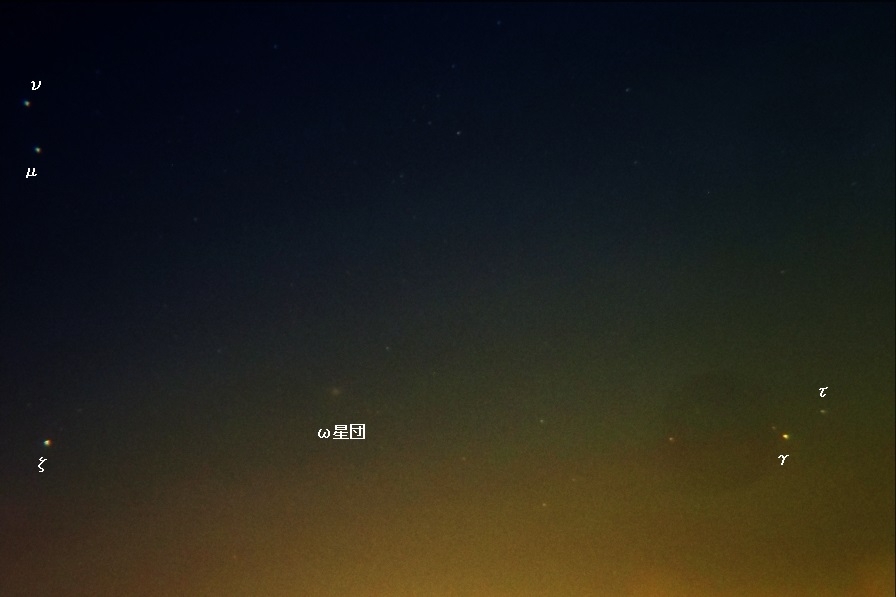
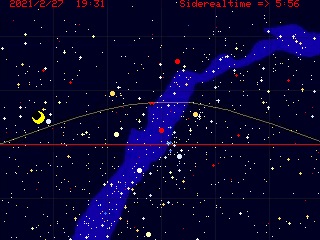
丂慜夞偺惎嵗憗尒斦偼丄梊傔敀偄夞揮夋憸偵揤偺愳傗庡側峔惉傪慠傞傋偒偺埵抲偵昤偄偰偍偄偰丄偦傟傪憗尒斦夋憸偺屻傠偱抧曽帇峆惎帪偵崌傢偣偰夞揮偝偣偰昞帵偟偨傕偺偩偭偨丅
丂崱夞偼丄崟偄夞揮斦偵揤偺愳偩偗偼儀僞揾傝偱昤偄偰偍偒丄俁摍媺傑偱偺峆惎傪寁嶼幃偱僾儘僢僩偟偨傕偺傪昞帵偝偣傞偙偲偵偟偰傒偨丅崟偄夞揮斦偵偼揤偺愳偺條巕傪愒宱侽帪偺埵抲偵崌傢偣偰昤偄偰偍偔丅偙傟傪
lcd.pushImageRotateZoom(120,120,120,120,360-sidereal,1.0,1.0,240,240,amanogawa);
偲偄偆幃偱峆惎帪偵崌傢偣偰斀帪寁夞傝偵夞揮偱偒傞傛偆偵偡傞丅
丂俁摍惎傑偱偺峆惎偺愒宱丒愒堒丒摍媺丒峆惎怓傪攝楍偵擖傟偰偍偔丅
lcd.fillCircle(120-0.822*(90-stars[ct*3+1])*cos(toRad * dat ),120+0.822*(90-stars[ct*3+1])*sin(toRad*dat),2-int(stars[ct*3+2]/2),color[iro[ct]]);
偲偄偆幃偱崟偄夞揮斦忋偵惎乆傪僾儘僢僩偟偰偄偔丅
dat丂偼丂dat=sidereal-stars[ct*3]+90;丂,丂stars[ct*3]丗愒宱丂stars[ct*3+1]丗愒堒丂stars[ct*3+2]丗摍媺丂,丂0.822偼丄塼徎拞墰乮揤捀乯偐傜抧暯傑偱偺丄愒堒偲僪僢僩悢偺姺嶼學悢
丂dat偺幃偱側偤+90偑昁梫側偺偐偼晄柧偩偑丄偙傟偱忋庤偔昞帵偱偒傞(^^;)
|
丂1.28僀儞僠偺彫偝側僨傿僗僾儗乕側偺偱榁娽偵偼尒偊偵偔偄偺偩偗傟偳丄帪乆偵尒傞偦偺帪偺惎嬻偼寢峔妝偟偄丅
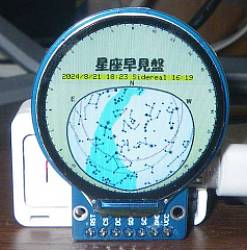
R6.8.21丂M5Capsule偱惎嵗憗尒斦
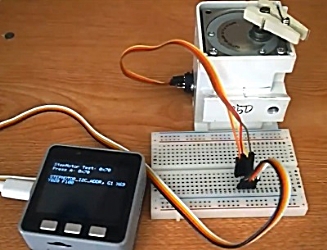
丂傆偲尒傞偲丄M5Capsule偲GC9A01A偺僺儞偑挌搙椙偝偦偆偩丅M5僔儕乕僘偱塼徎傪巊偆偲偒偵偼丄偄偮傕VCC偲GND偺埵抲偑栤戣偵側傞偺偩偗傟偳丄M5Capsule偲GC9A01A偺応崌偼傄偭偨傝崌抳偟偨(^^)/
 |
丂偦傟傕GND偲VCC傪彍偄偨僺儞悢傕Capsule偵偼GPIO1乣9傑偱偺俆僺儞偑暲傫偱偄偨(^^)/丂偙傫側偵儔僢僉乕側嬼慠偼偦偆偁傝傖偟側偄丅Atom偺僗働僢僠傪懡彮曄峏偟偰嵎偟崬傫偱傒偨丅夋憸偑昞帵偝傟傞傑偱A儃僞儞偼墴偟懕偗傞昁梫偑偁傞偑摦偄偨(^^)/丂GPIO42偼HIGH偵偟偰偍偔昁梫偑偁傝偦偆偩丅
丂晛捠偺惎嵗憗尒斦偺傛偆偵庤偱夞偡傢偗偱偼側偄偺偱丄側傞傋偔夋柺傪戝偒偔偟偰傒偨丅憢傕惓妋偝傛傝丄峀偔尒偊傞傛偆偵偟偰傒偨(^^)
丂嵟弶偵丄M5Atom傪婲摦偟偨帪偵擔帪傪摼偰抧曽帇峆惎帪傪寁嶼偡傞丅偦偺峆惎帪偵崌偆傛偆偵攚屻偺慡揤惎恾傪夞揮偟偰昞帵偡傞丅惎嵗憗尒斦偺暥帤偑偁傞夋憸偼偦偺傑傑夞揮柍偟偱昞帵偡傟偽丄偦偺擔帪偱偺尒偊傞惎嬻偑昞帵偝傟傞偲偄偆偙偲偵側傞丅屻偼丄僐儞僷僋僩偵慻傒棫偰傟偽OK丅
 |
丂偲偄偆偙偲偱丄偲傝偁偊偢姰惉偟偨丅攝慄梡僐乕僪偑側偄偺偑婐偟偄(^^)
R6.8.20丂娵宆塼徎偱惎嵗憗尒斦
丂AliExpress偝傫偱乽1.28僀儞僠tft LCD僨傿僗僾儗僀儌僕儏乕儖,儔僂儞僪rgb 240x240 gc9a01僪儔僀僶乕乿偲偄偆偺傪峸擖偟偨丅幐攕偡傞偺傪梊憐偟偰俁偮傕丅
丂帺椡偱偼巊偆偙偲偑偱偒側偄偺偱(^^;)専嶕丅sullblue偝傫偺乽M5atom LITE偵娵宆塼徎傪宷偄偱昞帵偝偣偰傒傞乿傪偟偭偐傝撉傫偱丄乽lovyanGFX傊偺懳墳乿傪巊傢偣偰偄偨偩偄偰嵞尰偱偒偨丅巊偆俵俆偺俧俹俬俷僺儞偵崌傢偣偰僺儞斣崋傪曄峏偡傟偽俷俲丅姶幱偱偡(^^)/
 |
丂惎嵗憗尒斦傪昞帵偟傛偆偲巚偆偺偱丄慡揤惎恾偲偦傟偵旐偣傞僇僶乕傪昞帵偟側偔偰偼偄偗側偄丅傜傃傗傫偝傫偺乽LovyanGFX擖栧 偦偺5 夋憸昤夋乿傪尒側偑傜丄揔摉側夋憸傪昞帵庤彂偒偟偰傒偨丅偆乕傓LovyanGFX偭偰偡偛偄側丄夵傔偰姶怱偡傞(^^)丂傜傃傗傫偝傫桳擄偆偛偞偄傑偡丅
丂埲慜丄SmallBasic偱惎嵗憗尒斦傪嶌偭偰偄偨偺偱偦傟傪墳梡偡傞丅岾偄偵巊偭偨夋憸偑巆偭偰偄偨偺偱丄偦傟傜傪240亊240偵弅彫偟偰傒偨丅
 |
丂師偵丄夋憸偺夞揮丅\Arduino\libraries\LovyanGFX\examples\HowToUse\5_images偺僒儞僾儖僗働僢僠偵彂幃偑偁傞丅夞揮偝偣傞慡揤夋憸偼丄lcd.pushImageRotateZoom丂偱僘乕儉偼晄梫側偺偱丄昤夋攞棪傪XY偲傕1.0偵偡傞丅
丂僇僶乕夋憸偺曽偼丄惎傪尒傞憢傪敀怓偵偱傕偟偰偍偄偰丄lcd.pushImage丂偱敀傪摟夁巜掕偵偡傟偽傛偄丅偙傟偱慡揤惎恾偩偗偑夞揮偡傞丅幚嵺偵偼昁梫側偄偑丄僥僗僩偲偟偰侾昩枅偵彂偒懼偊偰傒偨丅僠儔僠儔姶偼偁傞(^^;)
R6.3.1丂姰惉
丂帪崗傪摼傞僞僀儈儞僌傪丄嵟弶偺儊僯儏乕昞帵偺帪偵偡傞偙偲偵偟偨丅師乆偲尒傞懳徾傪慖戰偡傞嵺偵偦偺儊僯儏乕夋柺偵栠傞偺偱丄栠傞搒搙怴偨側尰帪崗傪摼傞偙偲偑偱偒傞丅偙傟偵傛偭偰丄僗働僢僠偼傎傏姰惉偟偨丅
丂屻偼丄曽埵傪摦偐偡儌乕僞乕偲僊儎偺梀傃偑戝偒偄偺偱丄偙傟傪夵慞偟側偗傟偽側傜側偄丅
 |
 |
 |
 |
 |
R6.2.28丂姰惉娫嬤丠
丂傛偆傗偔僗働僢僠偼姰惉偟偨丅嵟弶偵婎弨偲側傞峆惎傪慖戰屻尒偨偄儊僔僄傪慖戰丅尒偨屻偼偦偺儊僔僄傪婎弨偵師偺儊僔僄傊丅杮摉偼帇峆惎帪傕嵞寁嶼偩傠偆偗偳丄偦偺偆偪幚憰(^^;)丂偙傫側偙偲嵟嬤偺婡嵽偱偼摉慠偩傠偆偗偳丄帺暘偱傗傞偲側傞偲側偐側偐擄偩丅
偙偙偱尒傟傑偡丅
R6.2.27丂巇忋偘偺抜奒
丂曽埵幉偺僗僥僢僾儌乕僞偺摦偒偑椙偔側偄丅僊儎偺偐傒崌傢偣偑埆偄傛偆側偺偱丄偙偙傕儀傾儕儞僌傪姎傑偣傞丅Ori兝偐傜M42傊偺嬤応偱傕搙乆儈僗丅偨偩丄僶僠僢偲崌偆偲偒偼婐偟偄(^^)/丂偱傕嬤応偩偐傜偹(^^;)
丂奜偱娤朷偡傞傕偺偩偐傜丄壠偺拞偺WiFi偵偮側偑傝偵偔偄丅擭寧擔偲帪崗偩偗偩偐傜丄嵟弶偵擖椡偡傞傛偆偵偡傞偐側丅偁偲戝愗側偺偼宱堒戜偺悈暯搙偩丅撿揤偵尷偭偰偄傞偺偱曽埵傪恀杒偵偡傞昁梫偑側偄丅峆惎偲儊僔僄偺憡懳埵抲偱摫擖偡傞偺偱丅
丂曽埵幉偵傕儀傾儕儞僌傪姎傑偣偨偑丄怴偨側壽戣偲偟偰崅搙幉偲摨偠慻傒崌傢偣偺儌乕僞偲僊儎側偺偵梀傃偑戝偒偄丅
丂崱斢偼塤傕側偔姦偔傕側偔婥暘椙偔帋塣揮(^^)丂僔儕僂僗婎弨偱M46偼堦敪偱擖偭偨丅峏偵僔儕僂僗婎弨偱M42傕擖偭偨(^^)丂M46偐傜M42偼晄壜(^^;) 丂壗偐娫堘偭偰傞
R6.2.25丂杮懱傕偱偒偮偮偁傞
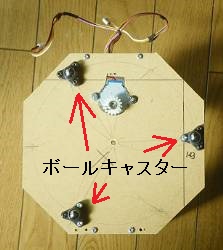
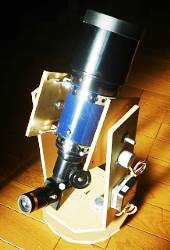
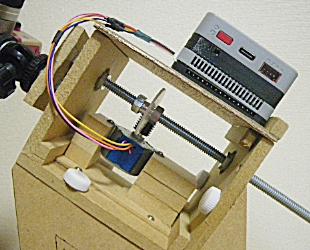
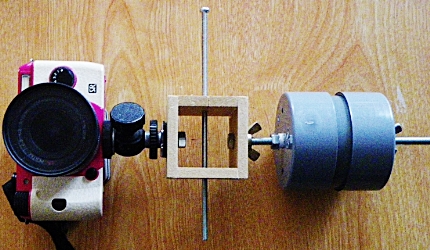
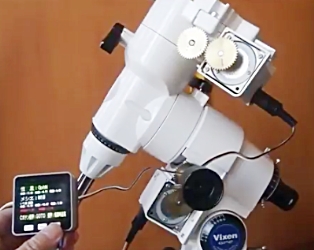
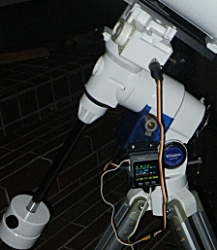
丂傛偆傗偔2屄偺僗僥僢僾儌乕僞乕偑抧暯嵗昗幉偵偔偭偮偄偨丅崱偺強晧壸偼側偄偺偱摦偒偼傑偁傑偁丅偙偙偵899g岥宎8cmf300mm13攞4.7搙帇栰偺傾僋儘儅乕僩朷墦嬀偑偺偭偐傞丅寢峔僶儔儞僗偑旝柇側偺偱丄儌乕僞偺摦偒偵塭嬁偑弌傞偐傕偟傟側偄丅
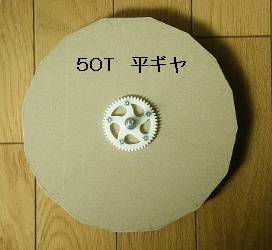
丂28BYJ48偼夵憿偟偰偄傞偟丄暯僊儎傕巊偭偰偄傞丅僗働僢僠偺拞偱偺愝掕傕愄偺偙偲側偺偱傢偐傜側偔側偭偰偄傞偺偱丄1夞揮偡傞偺偵壗僗僥僢僾昁梫側偺偐寁嶼偱偒側偄(^^;)丂偦偙偱丄幚嵺偵帋峴嶖岆偱摦偐偟偰媮傔偰傒傞偲丄嬼慠偵36000僗僥僢僾偱1夞揮偟偨(^^)丂偙傟偼儔僢僉乕偩丅
 |
 |
偙偙偱尒傟傑偡丅
丂傎傏慻傒偁偑偭偨(^^)丂僗働僢僠傕栚帇偱偼栤戣側偄傛偆偩丅揤婥椙偝偦偆側栭傪慖傫偱幚嵺偵摦偐偟偰傒傞(^^)丂偟偐偟丄杒揤偵偟偨偲偒偺崅搙憖嶌偺曽岦偑媡偵側傞偙偲偵偼崱屻偺壽戣偩丅
R6.2.20丂忋庤偔偄偐側偄尨場敾柧
丂傗偭偲尨場敾柧丅僗働僢僠偵擖椡偟偨寁嶼幃偼栤戣側偐偭偨丅 int宆偱媮傔偰偄偨峆惎帪偺LH帪偲LM暘傪傑偲傔傞帪偵丄sidereal=LH+LM/60;偲傗偭偰偨丅偄偮傑偱偨偭偰傕暘偼斀塮偝傟側偄傛偹(^^;)丂婥偑晅偄偰曫傟偨....
丂曽埵妏偼杒傪0搙偲偡傞応崌偲丄撿傪0搙偲偡傞応崌偑偁傞丅崙棫揤暥戜偺応崌偼慜幰偩丅庤寁嶼偡傞応崌偼屻幰偵側傞丅寁嶼抣偵+180搙偡傟偽斾妑偱偒傞偑丄偦傟偵壛偊徾尷栤戣偱崿棎偡傞傢偗偩丅偟偐偟丄偳偆傗傜tan(曽埵)幃偺暘巕暘曣偺晞崋偱応崌暘偗偱偒偦偆偩(^^)
丂偳偆偵偐偙偙傑偱棃偨(^^)丂僗僥僢僾儌乕僞乕傕偦傟側傝偵夞揮偟偰偔傟偨傛偆偩丅偁偲偼旝挷惍偩側丅偍偭偲両丂宱堒戜杮懱傪嶌傞偲偄偆戝偒側壽戣偑偁傞側(^^;)
 |
 |
偙偙偱尒傟傑偡丅
R6.2.18丂僜僼僩偺嶌惉
丂撿揤偵偁傞柧傞偄婎弨峆惎傪慖傫偱偐傜丄尒偨偄惎抍傪慖傇丅偦傟傜偺愒宱丒愒堒偲娤應揰偺堒搙丒宱搙丄帪崗偐傜崅搙丒曽埵偺嵎傪寁嶼偡傞丅偦偺抣傪傕偲偵俀戜偺僗僥僢僾儌乕僞偱朷墦嬀傪GOTO偝偣傞梊掕丅偟偐偟丄偦偺愒摴嵗昗偐傜抧暯嵗昗傊偺曄姺偑忋庤偔偄偐側偄(^^;) 曽埵偼係徾尷偁傞偺偱丄応崌暘偗偑昁梫側傛偆偩丅徾尷偵偮偄偰偼挿戲愭惗偺杮傗榁擫偙偰偮偝傫偺乽揤懱偺埵抲寁嶼 峆惎偺崅搙丒曽埵妏寁嶼乿傪嶲峫偵丅Stellarium偺僔儈儏儗乕僔儑儞偱僗働僢僠偺妋擣丅Stellarium偲僗働僢僠偺峆惎丒儊僔僄僨乕僞偼傎傏摨偠偲側傞偲寁嶼幃偐條乆側曄姺偑傑偢偄偺偩傠偆丅
丂偨偩丄Stellarium偺僔儈儏儗乕僔儑儞偲崙棫揤暥戜偺悢抣偼偩偄傇堘偆丅傕偪傠傫僗働僢僠偱寁嶼偟偨悢抣偲傕堘偆丅偨偩丄峆惎偲儊僔僄偺俀偮偺憡懳娭學偱俧俷俿俷偝偣傟偽偄偄偺偱丄愨懳抣偑惓偟偄偐惓偟偔側偄偐偼娭學偑側偄偲巚偭偰偄傞丅帺戭偱偺抧曽峆惎帪偩偟丅
偙偙偱尒傟傑偡丅
R6.2.17丂俧俷俿俷宱堒戜偺嶌惉
丂儐僯億乕儔偺28BYJ-48傪僶僀億乕儔偵偟偰DRV8834偱摦偐偡審丅埲慜傗偭偰偄偨僗働僢僠傪巊偭偰寽埬偺帺摦摫擖宱堒戜傪寁夋丅偡偭偐傝朰傟偰偄傞偺偱摦嶌僥僗僩偐傜(^^;)丅偙偺娐嫬偱1500僗僥僢僾偱360搙傪摼偨(^^)丂傾僶僂僩偱偡丅
 |
偙偙偱尒傟傑偡丅
R3.6.10丂僇儊儔儗儞僘僥僗僩嶣塭
丂挿嬍儗儞僘偵偟偨偺偼偄偄偗傟偳丄懳徾暔偑側偐側偐擖傜側偄偺偱丄儂僢僩僔儏乕偵巆偭偰偄傞憃娽嬀偺曅曽傪庢傝晅偗偰傒傑偟偨丅側偐側偐偄偄嬶崌偵側傝傑偟偨丅偙傟偩偲丄栰捁嶣塭偵傕偄偄偐傕偟傟側偄丅
 |
R3.6.8丂僇儊儔儗儞僘僥僗僩嶣塭
丂帺嶌90mm朷墦偱嶣塭丅M13傪慱偆偗傟偳側偐側偐擖傜側偄丅傛偆傗偭偲擖偭偨偺偱俁枃嶣塭丅僩乕儞僇乕僽挷惍偱攚宨傪埫偔偟偰偐傜壛嶼崌惉偟傑偟偨丅僺儞僩崌傢偣偑壽戣偩偗傟偳丄巊偭偨憃娽嬀偺儗儞僘偑側偐側偐傗傫偪傖偩丅戝偒傔偺嶶奐惎抍偺嶣塭偑崌偭偰偄傞偐側丅寢峔惎偺怓偑弌偰偄傞偲巚偆偗傟偳丄偳偆偩傠偆丅
 |
 |
丂忋塃懁偺幨恀偼姤嵗偺兯1丒兯2丅摨偠傛偆側怓偱柧傞偝偺惎偑暲傫偱報徾揑丅
丂冎惎抍偑尒偊傞僠儍儞僗側偺偱丄撿偺嬻偑尒偊傞応強傪扵偟偰偍偄偰弌偐偗偰傒傑偟偨丅幨傝傑偟偨偹丅02昗弨朷墦偺15mm偵俀X僥儗僐儞晅偗偰傑偡丅
 |
 |
丂戧惎恾偱摨掕偟傑偟偨丅偁傝偑偲偆偛偞偄傑偡丅
R3.6.9丂僇儊儔儗儞僘嶌惉俀
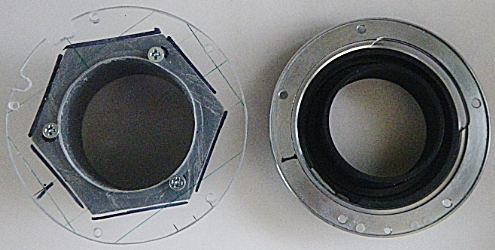
丂慜嶌偑挿嬍夁偓偰埖偄偵偔偐偭偨偺偱丄彫偝側憃娽嬀偺懳暔儗儞僘傪巊偭偰傒傑偟偨丅徟揰嫍棧90mm掱丅偄偮傕偺墫價娗梡晹昳傪巊偄儗儞僘傪曐帩偡傞傕偺偲偟丄巊偭偰偄側偄pentax儗儞僘偐傜嬥嬶傪奜偟庢傝晅偗傑偟偨丅偙傟偱30昩業弌傪妋曐偡傞偙偲偑偱偒傑偡丅
 |
 |
 |
R3.6.8丂僇儊儔儗儞僘僥僗僩嶣塭
丂帺嶌130mm朷墦偺僥僗僩嶣塭丅僺儞僩崌傢偣偲栚昗掕傔偑尩偟偄両(^^;)
 |
 |
丂30昩業弌偱1枃栚丅偄偄傫偠傖側偄(^^)丂棳傟傞偙偲傕懡偄偱偡丅俀枃栚偼億僞愒傪巭傔偰傒傑偟偨丅巭傔傞偲丄偙傫側偵棳傟傑偡丅億僞愒捛旜傑偁傑偁忋庤偔偄偭偰偄傞偐側丅師偼傕偆彮偟抁偄儗儞僘傪嶌惉偟傑偡丅
R3.6.7丂僇儊儔儗儞僘傪嶌傞
丂PentaxQ10偱惎嬻傪嶣塭偡傞偺偩偗傟偳丄帺嶌億僞愒偑偳偺掱搙偺幚椡側偺偐傪僥僗僩偟偰偍偐偹偽側傝傑偣傫丅02昗弨僘乕儉傛傝傕挿偄偺偑偄偄偲巚偄傑偡偑丄06僥儗僘乕儉偼側偐側偐庤偵擖傜側偄偺偱丄庢傝姼偊偢庤帩偪嵽椏傪巊偭偰130mm(35mm姺嶼偱715倣倣丠)朷墦(3cm僼傽僀儞僟乕儗儞僘巊梡)傪嶌惉偟傑偟偨丅偙偺挿徟揰偵帺嶌億僞愒偑偮偄偰偙傟傞偐側丠
 |
 |
R3.5.20丂億僞愒傪夵椙偡傞
丂堦墳億僞愒偼偱偒偨偗傟偳丄僇儊儔偺曽岦曄姺偵庤娫偑偐偐傞偺偱戞俀抏丅愄側偑傜偺億僞愒丅崅峑惗偺偙傠偵偐僞儞僕僃儞僩僗僋儕儏乕偺庤夞偟曽幃偱嶌偭偨傕偺傪嵞尰丅傕偭偲傕丄崱夞偼M5Stack偲僗僥僢僺儞僌儌乕僞乕傪巊梡偟偨帺摦捛旜丅
 |
丂埲慜偐傜傕儅僀僐儞傪巊偭偨帺摦惂屼偼偁偭偨偺偩偗傟偳丄慺恖偺恎偵偼塤偺忋偺榖偩偭偨偺偱偡丅偦傟偑埬奜娙扨偵偱偒傞偺偼丄M5Stack偺弌尰偺偍堿偱偡丅傕偪傠傫丄儅僀僋儘價僢僩傗儔僘儀儕乕僷僀偱傕偱偒傞偩傠偆偗傟偳丅
丂M5Stack偺応崌偵偼丄杮懱偺拞偵僗僥僢僺儞僌儌乕僞乕僪儔僀僶傕擖偭偰偟傑偆偟丄僗僥僢僺儞僌儌乕僞傪摦偐偡僶僢僥儕乕傕嫟梡偱偒傞偟偱丄僐儞僷僋僩側偙偲偙偺忋偁傝傑偣傫(^^)v
 |
丂億僞愒杮懱拞偵偼丄M5Stack埲奜偵偼僗僥僢僺儞僌儌乕僞乕偲僊儎孮偟偐尒偊傑偣傫丅偙傟側傜丄傕偭偲僐儞僷僋僩偵側傞偐傕丅
丂姰惉偼偟偨偺偱偡偑丄巚偭偨傛傝傕攡塉偑憗偔側偭偰偟傑偭偨偺偱帋幨偑偱偒傑偣傫偱偟偨丅傑偁丄愭偺妝偟傒偵偟偰丄師偼俉們倣孅愜偺GOTO宱堒戜嶌惉偱偁傝傑偡丅
R3.5.5丂億僞愒傪姰惉偡傞
丂嶌偭偨億僞愒偱嶣塭偟偰傒傞偲丄壓偺傛偆側夋憸傪摼傞偙偲偑偱偒傑偟偨丅彫偝偄夋憸偱尒傞偲揰憸偵側偭偰偄傑偡偑丄奼戝偡傞偲怢傃偰偄傑偡丅偟偐偟丄M5Stack偵傛傞捛旜偑抶偄偺偐懍偄偺偐偼偙傟偱偼傢偐傝傑偣傫丅彮乆僾儘僌儔儉傪曄偊偰偦偺偁偨傝傪暘偐傞傛偆偵偡傞梊掕偱偡丅偙偺夋憸偼丄PentaxQ10丄昗弨僘乕儉15mm乮35mm姺嶼75mm乯偱丄iso1600偺30昩業弌偱偡丅
 |
丂堦扷偼丄僶儔儞僗悗傪峫偊偨偺偱偡偑丄偙傟偩偲廲埵抲嶣塭偵側傞偺偱媝壓偟傑偟偨丅悗傪墫價僷僀僾偱嶌惉偟偰婥偵擖偭偰偨傫偱偡偗傟偳(^^;)
 |
丂傆偲婥偑晅偄偰丄傕偆彮偟僇儊儔傪嵹偣傞晹暘傪挿偔偟偰傒傞偲帩偭偰偄傞寉検偺塤戜偱侾俉侽亱嬤偔傪僇僶乕偱偒偨偺偱丄偙偺宍偵偟傑偟偨丅嬌幉偵懳偟偰怺傔偺埵抲偱巟帩偡傞偲僇僂儞僞乕悗傪巊偆昁梫傕側偐偭偨偺偱偄偄夵憿偵側傝傑偟偨丅
 |
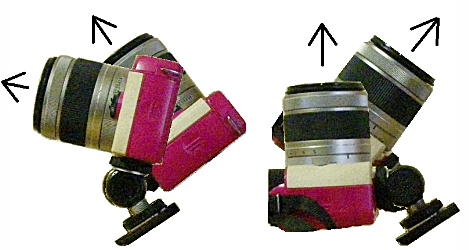
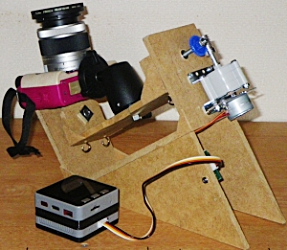
丂偙傫側姶偠偵僇儊儔傪撿揤偐傜杒揤傑偱摦偐偣傑偡丅彮乆戝宆偵側偭偰偟傑偭偨偺偱偡偑丄慡懱傪杒嬌惎偺曽岦偵岦偗偰抧柺偵抲偔偩偗偱嶣塭偱偒傞偺偱曋棙偐側偲擺摼偟偰偄傑偡丅
 |
丂壗偲偄偭偰傕丄M5Satck偺僾儘僌儔儉偲僶僢僥儕乕偱塣梡偱偒傞偺偑堦斣偺棙揰側偺偱偼側偄偐側丅偙偺億僞愒偼俀倁摦嶌偺俶俹俵 俹俥俀俆亅係俉俀俉侾偲偄偆彫宆偺僗僥僢僾儌乕僞乕傪巊梡偟偰偄傞偙偲偑栚嬍偵側偭偰偄傞偲巚偄傑偡丅
R3.4.27丂億僞愒傪嶌傞
丂僣僀僢僞乕偵彂偒棷傔偰偍偄偨傕偺傪傑偲傔偰偍偒傑偡丅
丂寧偑柧傞偡偓偰惎傪嶣塭偟偰傕柺敀偔側偄偺偱備偭偔傝嶌惉偟偰偄偨億僞愒偑姰惉娫嬤偱偡丅
丂嶌惉拞偵偄偪偄偪僗僞僢僋傪暘棧偡傞偺傕柺搢偩偟丄M5Stack撪攝慄傪朰傟偰偟傑偆偺偱撪晹攝慄偺夋憸傪嶌惉偟偰偍偒傑偟偨丅
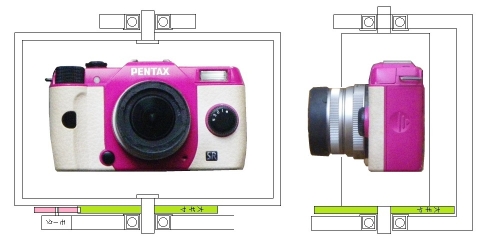
 |
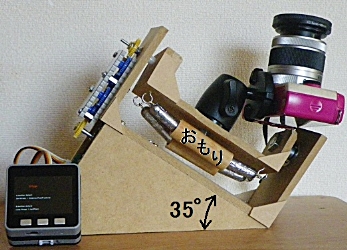
丂壓偺傛偆側宍偱姰惉傪峫偊偰偄傑偟偨丅35搙屌掕偵偟偰偍偄偰丄嶣塭抧偺堒搙偑堎側傞応崌偵揔摉偵岤巻嫴傫偱曄峏偟傑偡丅巹偺偲偙傠偼34搙側偺偱丄僇儊儔懁偵巻傪偼偝傒傑偡丅僶儔儞僗偑埆偐偭偨偺偱悗傪晅偗傑偟偨丅
 |
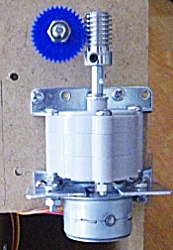
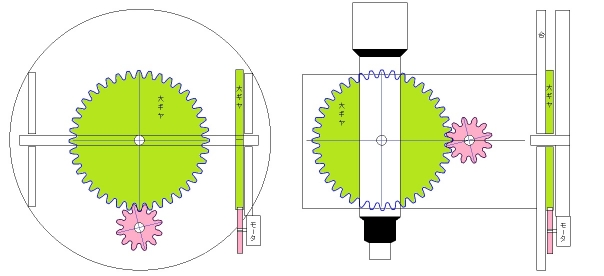
丂帋塣揮偟偨偲偙傠丄僊儎偺梀傃偑懡偡偓偰僗儉乕僘偵摦偒傑偣傫偱偟偨丅寢嬊丄搑拞偺暯僊儎偼巭傔偰僂僅乕儉僊儎傪巊偄傑偟偨丅梀惎僊儎傕俀僙僢僩巊偭偰20:1偵偟偰丄僂僅乕儉偲崌寁偱720:1偵偟傑偟偨丅60偺攞悢偵側偭偨偺偱丄寁嶼偟傗偡偄偐傕偟傟傑偣傫丅
丂僇儊儔戜偲偺愙懕偼3mm偱偼庛偐偭偨偺偱丄4mm偵懢偔偟傑偟偨丅偙傟偱偳偆偐丠丂偝傜偵懢偔偟偰5mm偵偟傛偆偲偡傞偲丄庤帩偪偺儀傾儕儞僌偑側偄偙偲偲丄僊儎偵5mm寠傪偁偗側偔偰偼偄偗側偄丅崱偺忬懺偱嶣塭偑偱偒傟偽側丅
 |
丂偙傫側姶偠偵側偭偰丄
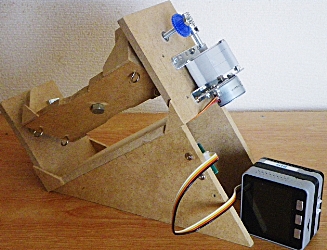 |
丂姰惉宍偱偡丅delay(887)偲偟偰丄887儈儕昩枅偵俀僗僥僢僾夞偟偰傗傟偽峆惎帪捛旜偑偱偒偦偆偱偡丅
 |
R3.4.19丂奿埨僗僥僢僾儌乕僞乕僎僢僩
丂僗僥僢僾儌乕僞乕偑傕偭偲昁梫偩偭偨偺偱丄掅揹埑偱摦偔傕偺傪奿埨偱峸擖偟傑偟偨丅28BYJ-48偲偄偆儌乕僞偱偡丅偙傟偼俆慄偺儐僯億乕儔側偺偱偡偑丄壛岺偡傟偽係慄僶僀億乕儔偲偟偰巊偊傞忣曬偑偁偭偨偺偱慖傫偩偺偱偡丅傑偨丄俆V偲偄偆偙偲側偺偱丄M5Stack偺僶僢僥儕乕偱摦偔偐側偲偄偆偙偲偱...婋尟偐傕(^^;)
 |
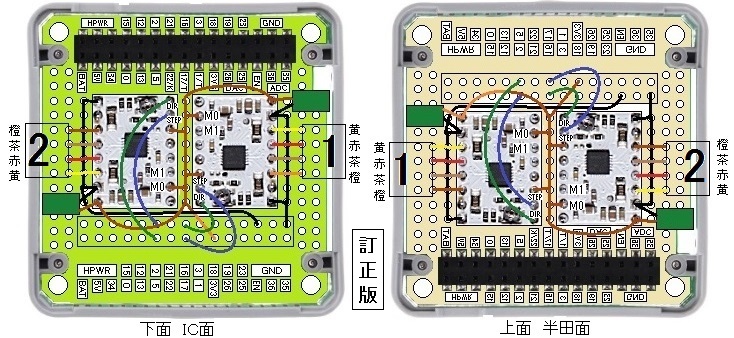
丂傑偢壛岺偑昁梫偱偡丅棤傇偨傪奜偟.....娙扨偵偼彂偗傞偗傟偳丄奜偡偺偑擄偟偐偭偨丅偄偄岺嬶偑偁傟偽娙扨側傫偩偗偳丅偝傜偵慻傒棫偰傞偲偒偵係杮偺僊儎幉崌傢偣偑柺搢偱偟偨.....俀偮偺僐僀儖偑拞墰偱愒僐乕僪偱偮側偑偭偰偄傞偲偙傠傪抐慄偝偣傑偡丅偮側偑偭偪傖傑偢偄偺偱丄婎斅偺摵敁傪嶍偭偰乮幨恀偱敀偔側偭偰偄傞偲偙傠乯偟傑偄傑偡丅愒僐乕僪偼巊偄傑偣傫丅
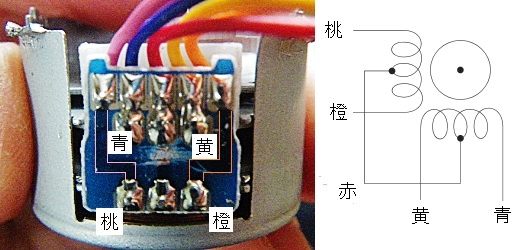 |
丂俀偮偺僐僀儖偵偮側偑傞摫慄偼丄偦傟偧傟搷偲烌丄墿偲惵偑僙僢僩偱偡丅巹偼儌乕僞乕偐傜弌偰偄傞忬懺偱丄搷偲惵丄墿偲烌傪僙僢僩偵偟偰攝慄偟偰偟傑偭偨偺偱丄堦曽岦偵偟偐夞傜偢丄擸傒敳偒傑偟偨(^^;)
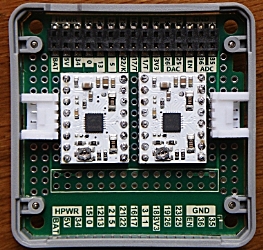
丂偙偺僗僥僢僾儌乕僞乕偵偼僪儔僀僶儃乕僪傕偮偄偰偄傑偡偑丄M5Stack偺俀偮偺GPIO僺儞偩偗偱侾屄偺儌乕僞乕傪摦偐偟偨偄偺偱丄偙傟傑偱偵嶌偭偰偍偄偨俀枃偺DRV8834偑擖偭偨BUS儌僕儏乕儖傪巊偭偰偄傑偡丅忋偲壓偺懁偵偮偗偨Grove億乕僩晽乮僐僱僋僞傪巊偆偩偗偱丄Grove億乕僩偱偼偁傝傑偣傫乯偺偲偙傠偵俀偮偺僗僥僢僾儌乕僞乕傪偮側偘傞梊掕偱偡丅
摦偒偼偙偙偱尒傟傑偡丅
R3.4.17丂梀惎僊儎傪偮側偘傞
丂儅僀僋儘僗僥僢僾側恑捇忬嫷偱偡(^^;)丂僗僥僢僾儌乕僞乕偲梀惎僊傾儃僢僋僗偑偮側偑傝傑偟偨丅師偼丄梀惎僊傾偲愒摴媀偺嬌幉偲宷偘側偔偰偼偄偗傑偣傫丅
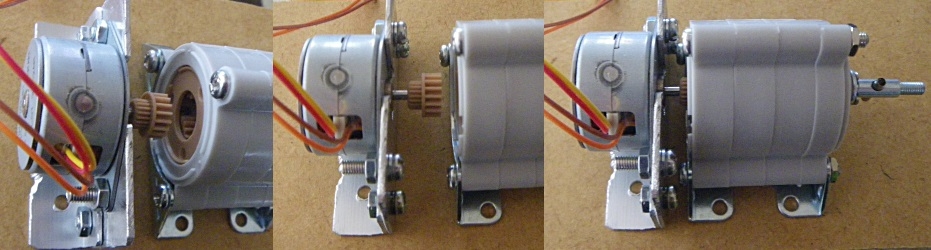 |
丂僞儈儎偺儃乕僪傪巊偭偨偺偱丄僞儈儎偺僊儎偲埵抲僺僢僠偑堦弿偩偭偨偺偼婐偟偄丅僊儎傪暲傋傞偲俇們倣傎偳偵側傝丄梀惎僊儎偲愒摴媀偺嬌幉傪偮側偘傞偙偲偑偱偒偦偆(^^)
 |
丂寢嬊丄捈慄攝抲偱側偔尰暔崌傢偣偱埵抲傪寛傔傑偟偨丅
 |
R3.4.14丂侾儅僀僋儘僗僥僢僾偱俀搙偐側(^^;)
丂M5Stack偺GPIO僺儞偲DRV8834偺M0丄M1偺愙懕傪偄傠偄傠傗偭偰傒傑偟偨偑丄寢嬊GPIO僺儞傪俀偮巊偆偙偲偵偡傞偲丄侾儅僀僋儘僗僥僢僾偱俀搙庛偑尷奅偱偟偨丅巊偊傞恖偑傗傞偲傕偭偲彫崗傒偵偱偒傞偺偩傠偆偗偳(^^;)丂傑偁丄柍棟偟偰峫偊傞傛傝傕丄儌乕僞乕偲嬌幉偲偺娫偵尭懍僊儎傪擖傟傟偽偄偄偲偄偆偙偲偱擺摼偟傑偡丅
丂埲慜丄峸擖偟偰巊傢側偄偱偄偨梀惎僊儎儃僢僋僗丅嵟嬤峸擖偟偨僊儎僙僢僩傗僂僅乕儉僊儎側偳偑偁傞偺偱偳偆偵偐側傞偱偟傚偆丅
 |
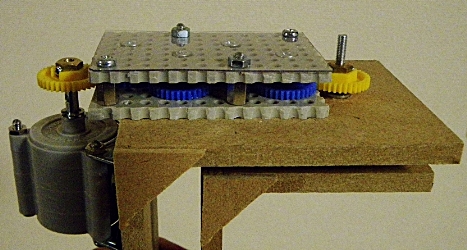
丂僊儎儃僢僋僗俁屄傪巊偭偰丄100:1偺尭懍斾偵偟偰傒傑偟偨丅傕偲傕偲儅僽僠儌乕僞乕傪巊偆偺偱丄偙偺僗僥僢僾儌乕僞乕偺俀mm幉偵僊儎偑崌抳偟偰愙懕偑偆傑偔偱偒偰偄傑偡丅偁偲偼丄屌掕嬥嬶偺嶌惉偲梀惎僊儎偐傜嬌幉傑偱偺娫偺暯僊儎楢実偩偗偱偡丅(^^)
R3.4.10丂DRV8834偵曄峏
丂夞偭偨偼偄偄偗傟偳丄DRV8835偱偼M5Stack偺GPIO僺儞傪係杮巊偆偺偱丄儌乕僞乕傪侾屄偟偐巊偊側偄偙偲偵婥偯偒傑偟偨(^^;)丂偝傜偵丄儅僀僋儘僗僥僢僾偲偄偆妸傜偐偵夞偡曽朄傪抦傝丄扵偟夞偭偨偲偙傠丄DRV8834偲偄偆侾斣堘偄偺僪儔僀僶傪敪尒丅拲暥偟傑偟偨丄俀屄(^^)丂
丂偡偖偵撏偄偨偼偄偄偗傟偳乮僗僀僢僠僒僀僄儞僗偝傫偼懍偄両乯丄夞傜側偄両丂(^^;)
丂帒椏傪怺撉傒偟偰乮僌乕僌儖東栿偟傑偟偨(^^;)乯偁傟偙傟傗偭偰傒傞偲丄僊儏僊儏偭偲摦偒偦偆偩偭偨偺偱丄億僥儞僔儑儞儊乕僞側傞傕偺傪夞偟偰傒偨偲偙傠丄摦偒傑偟偨両丂(^^)/
丂柺搢側偙偲乮僗儈儅僙儞乯偩偗偱側偔丄巹偺傛偆側傗傝曽偱乮偄偄偲巚偆偺偼帺暘偩偗丠乯挷惍傕偁傝側偙偲傪彂偄偰偄偰傎偟偄偱偡丅偟偐偟丄偙偙偺挷惍偼昁恵偱偡偟丄偐側傝旝柇偱偡丅傎傫偺傢偢偐堘偆偩偗偱巭傑偭偰偟傑偆偟....
丂帒椏偱偼丄應掕傗傜寁嶼傗傜柺搢側偙偲傪彂偄偰偄偨偺偱抦傜偸傆傝傪偟偰偄偨偗傟偳丄偙偙偑億僀儞僩側偙偲偼婥偯偄偰偄傑偟偨(^^;)丂傑偁丄夞傟偽偄偄偲偄偆偙偲偱丅壓偺傛偆側攝慄偱偡丅
偙偙偱摦偒偑尒傟傑偡丅
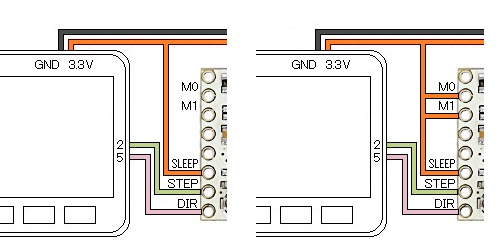
 |
丂帒椏傪撉傫偱偄偰婥偑晅偄偨偗傟偳丄M0偲M1傪寢慄偟側偗傟偽丄1/4僗僥僢僾儌乕僪偵側偭偰偄傞偲偺偙偲丅傗偭偰傒傞偲摦偒傑偡偹丅偝傜偵丄僗僥僢僾僒僀僘偺昞傪尒傞偲丄M0丒M1偺憃曽傪HIGH偵偡傞偲丄1/16僗僥僢僾丅M5Stack偱憖嶌偟側偔偰傕3.3V壛揹偡傟偽偄偄傫偠傖側偄偐偲偄偆偙偲偱傗偭偰傒傞偲丄夞傝傑偟偨丅傕偭偲傕1/4偲1/16偺堘偄偑暘偐傜側偄(^^;)丂傑偁丄夞偭偰傟偽偄偄偲偄偆偙偲偱丅
 |
丂偝偰丄夞傞偙偲偑暘偐偭偨偲偙傠偱丄BUS儌僕儏乕儖偵僙僢僩偟偰傒傑偟偨丅僊儕僊儕偱偡偑丄擖傝傑偟偨丅
 |
丂墶偵憢傪嬻偗偰丄Grove僐乕僪偱儌乕僞乕偲偮側偘傟偽偄偄姶偠偵側傝偦偆偱偡丅儌乕僞乕偺僐乕僪偼係杮側偺偱丄Grove僐乕僪偑巊偊傞両
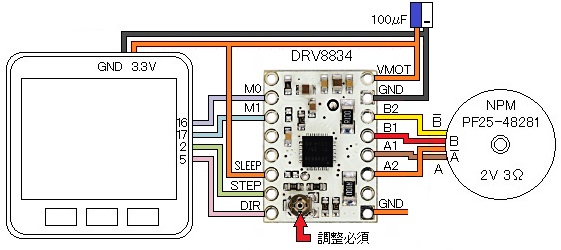
R3.4.7丂DRV8835偲NPM PF25-48281偲偺慻崌偣
丂堦敪偱夞傝傑偟偨(^^)/丂kazurock0926偝傫偺乽Arduino偱僗僥僢僺儞僌儌乕僞乕傪夞偡乿丄暔傪嶌傞幰偝傫偺乽Arduino偱僗僥僢僺儞僌儌乕僞傪惂屼偟偰傒傞乿丄fum125偝傫偺乽僗僥僢僺儞僌儌乕僞乕 28BYJ-48 傪 DRV8835 偱夞偟偰傒傞乿傪偟偭偐傝撉傑偣偰偄偨偩偒傑偟偨丅傒側偝傫桳擄偆偛偞偄傑偟偨丅m(_ _)m丂偙偙偱摦偒偑尒傟傑偡丅
 |
丂尒傗偡偄傛偆偵恾柺傪昤偄偰傒傑偟偨丅嵟弶偼儌乕僞乕傊偺揹尮嫙媼傪3.3V偱峴偄傑偟偨丅偟偐偟丄儌乕僞乕偑擬偔側偭偨偺偱丄恾柺偵偼偁傝傑偣傫偑丄M5Stack偲DRV8835偺VIN偲偺娫偵俆兌偺掞峈傪擖傟偰丄3.3V偐傜俆V偵偟偰偄傑偡丅偙偺儌乕僞乕偼俀V偲偄偆偙偲偱偁傝傑偟偨偺偱丅
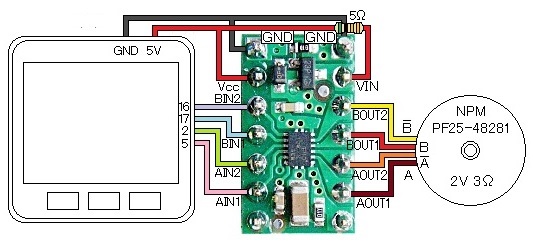 |
 |
R3.4.6丂VixenMT-1僗僥僢僺儞僌儌乕僞乕丂晅榐
丂GOTO愒摴媀偱惎抍傪摫擖偟偨屻丄旝挷惍傪偡傞偺偵儃僞儞傪巊偊側偄偺偱丄Joistick傪巊偭偰傒傛偆偐偲巚偭偰拲暥偟偰傑偟偨丅廫帤曽岦傊偺堏摦偑愒宱丒愒堒偵懳墳偡傞偺偱曋棙丅働乕僽儖傪挿偔偟偰巊偊偦偆(^^)丂晛捠偵斕攧偝傟偰偄傞愒摴媀僐儞僩儘乕儔偼傒傫側偦偆偩傕偺偹丅
丂偲傝偁偊偢偆傑偔偄偒傑偟偨丅
 |
丂拲暥偟偨僪儔僀僶偑梉曽偵撏偄偰傑偟偨(^^)/丂儌乕僞傕彫偝偄偗偳丄僪儔僀僶傕彫偝偄丅戝忎晇側偺偐側丠(^^;)丂惢昳偺椙偟埆偟偱側偔丄偙傫側偙偲傪婇偰傞帺暘帺恎偑(^^;)丂
 |
R3.4.5丂偲傝偁偊偢億僞愒偱帋偟偰傒傞
丂儌乕僞乕偑侾屄偟偐側偄偙偲偲丄傾僶僂僩側惛搙側傜妝側偺偱丄嵟弶偼億乕僞僽儖愒摴媀傪傗偭偰傒傑偡丅
丂擖庤偟傗偡偄暯僊儎10帟丗50帟慻傒崌傢偣偩偲丄4.8昩枅偵儌乕僞乕傪0.1搙夞揮偝偣傟偽峆惎帪捛旜偱偒偦偆偩偗偳丄娫堘偄偼柍偄偐側丠丂PentaxQ10偼30昩傑偱業岝偱偒傞偺偱丄熆戲偱嶣塭偟偰傒偨偄傕偺偱偡丅
R3.4.4丂俶俹俵偝傫偐傜彫偝偄僗僥僢僺儞僌儌乕僞乕傪擖庤
丂姡揹抮偱摦偔彫偝偄僗僥僢僺儞僌儌乕僞傪擖庤偟偨偺偱丄偐偹偰偐傜寁夋偟偰偄偨俉們倣孅愜偺栰奜娤嶡梡GOTO宱堒戜嶌惢寁夋傪幚峴偵堏偟偰偄偔偙偲偵偟傑偟偨丅壓偺夋憸偼僗働乕儖偑崌偭偰偄側偄偗傟偳...丂M5Stack偩偗偺僶僢僥儕乕偱摦偐偡偮傕傝偱偡丅
 |
R3.4.1丂僗働僢僠傪峏怴偡傞
丂嬌幉傪嫬偵丄嬀摏傪惣懁抲偒搶懁傪尒傞丄搶懁抲偒惣懁傪尒傞偲偵暘偗傑偟偨丅僗働僢僠偺setup撪偵丄儃僞儞墴偟偱愒堒儌乕僞偺夞揮曽岦傪曄偊傞曄悢傪+1偐-1偐偵慖戰丅娤朷偡傞儊僔僄偲峆惎傪慖傫偩屻偵丄儌乕僞夞揮妏搙偵偦偺曄悢傪忔偠傞偙偲偵偟傑偟偨丅忋庤偔帠偑塣傃傑偟偨丅
丂惎抍偼偟偛儌乕僪偺僥僗僩丅僔儕僂僗偐傜M93偼倃両丂僔儕僂僗偐傜M47仺M46仺M48偼OK丅M67偵峴偙偆偲偡傞傕倃丅偟偐偟丄億儖僢僋僗偐傜M44仺M67偼OK丅
丂M93偑尒偊側偄両丂戝偒偔偰偦傟側傝偵柧傞偄嶶奐惎抍側偺偵....側偐側偐擄偟偄傕偺偱偡丅
R3.3.28丂VixenMT-1僗僥僢僺儞僌儌乕僞乕丂晅榐
丂儌乕僞乕偱摦偐偡偙偲偑偱偒傞偲丄旝挷惍偵庤摦偱傕摦偐偟偨偄丅偦偆側傞偲丄愒堒儌乕僞乕偵傕僋儔僢僠偑偁偭偨曽偑偄偄偺偱丄扵偟傑偟偨丅偟偐偟丄Vixen弮惓昳偼惢憿廔椆偟偰偄傞傛偆側丅巇曽側偔拞屆傪扵偟偰偄傜丄僆乕僋僔儑儞偱丄乽愒摴媀旝摦丂僋儔僢僠丂 惢嶌昳 乿傪敪尒丅峸擖偟傑偟偨丅壓偺幨恀偺傛偆偵丄働乕僗傑偱嶌偭偰偔傟偰憲偭偰傕傜偊傑偟偨丅丂偁傝偑偲偆偛偞偄傑偡(^^)/
 |
丂偦偆偦偆丄偙偺僐儞僩儘乕儔偺堊偵M5Stack傪堦偮怴挷偟傑偟偨丅Basic偱偡偗偳丅杮摉偼Core2偑椙偐偭偨傫偱偟傚偆丅夋柺偵偨偔偝傫儃僞儞偑偱偒偦偆偩偟丅偦偆側傞偲丄懠偵傕巊偄偨偔側傞偺偱丄Basic偲偄偆偙偲偱丅
R3.3.27丂VixenMT-1僗僥僢僺儞僌儌乕僞乕惂屼俈
丂僥儗僗僐乕僾僀乕僗僩乛僂僄僗僩栤戣傪僾儘僌儔儉偱夝寛偡傞偺偑柺搢側偺偱丄偲傝偁偊偢僗働僢僠傪搶偲惣偱暘偗傑偟偨丅扨弮偵愒堒儌乕僞乕偺夞揮傪媡偵偡傟偽偄偄偩偗側偺偱丅偨偩丄偙傟傪僾儘僌儔儉偡傞偵偼敾抐嵽椏傪壗偵偡傞偐偱柪偆傢偗偱偡丅僙儞僒乕偱傕擖傟傟偽娙扨側偺偐傕丅
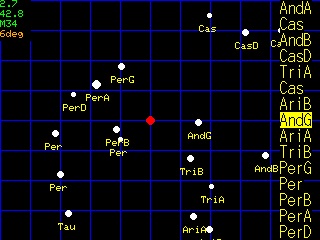
丂惣懁偺惎嬻偱GOTO僥僗僩俁夞栚丅偓傚偟傖嵗兝惎傪拞怱偵丄M35乣M38偲M1傪慱偄傑偟偨丅嶶奐惎抍偼偳傟傕擖傝傑偟偨偑丄M1偩偗偼暘偐傜側偐偭偨(^^;)丂偦偙偵偁傞両丂偲帺怣傪傕偭偰尵偊側偄偺偱偡(^^;)丂M1偼幨恀傕庢偭偨偙偲偁傞偺偵側丅寧偑枮寧嬤偔側偭偰偒偨偺偱丄傕偭偲屻偵妋擣偟偰傒傛偆丅
丂偳偺懳徾傕兝惎偐傜GOTO偟偨偺偱偡偑丄偄偪偄偪栠傞偵偼柺搢偱偡丅惎抍傪偼偟偛偡傞曽偑偄偄偱偡偹丅僗働僢僠傪曄峏偟傛偆丅偲側傞偲丄僗働僢僠傪堦偐傜彂偒捈偟偨曽偑偄偄側丅崱傑偱偼丄夵慞揰傪偦偺搒搙壛偊偨偩偗側偺偱丄栿偑暘偐傜傫傛偆偵側偭偰偟傑偭偨丅偟偭偐傝偲偟偨僼儘乕僠儍乕僩傪峫偊偰寁夋揑偵偟側偄偲偄偗側偄側丅
丂俉們倣彫宆孅愜偑偁傞偺偱丄偙傟傪儌僶僀儖側GOTO宱堒戜偵偟偰傒傛偆偐偺寁夋傪峫偊偰傑偡丅崱搙偼丄愒宱丒愒堒嵗昗偐傜曽埵丒崅搙嵗昗傊偺曄姺偵側傝傑偡側(^^;)丂擼僩儗偱偡丅
R3.3.26丂VixenMT-1僗僥僢僺儞僌儌乕僞乕惂屼俇
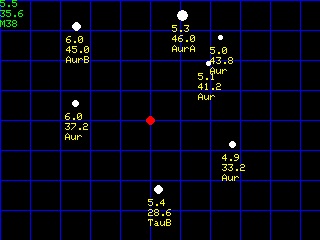
丂嶐斢丄75攞0.8搙偺帇栰偱GOTO僥僗僩2夞栚傪幚峴丅彫將嵗兛惎偐傜M48丄戝將嵗兛惎偐傜M41丒M47偼帇栰偵擖傝傑偟偨丅偨偩丄M46偼暘偐傜側偐偭偨(^^;)偱偡丅俇摍媺偱偡偑丄嵶偐偄惎偑懡偄嶶奐惎抍偱偦偽偵寧偑偁偭偨偨傔偱偟傚偆偐丅
丂憃巕嵗兝惎偐傜丄彮乆墦栚偺M44偼彮偟峴偒夁偓傑偟偨偑丄傑偁傑偁OK偲偄偆偙偲偱擖傝傑偟偨丅峆惎帪捛旜傕崅攞棪偱尒傞榝惎偼偩傔偱偟傚偆偑丄掅攞娤朷側傜廫暘OK偱偟偨丅偓傚偟傖嵗偁偨傝偺惎抍偼丄愒堒儌乕僞乕偑媡夞傝偵側傞偺偱師夞偺僩儔僀偲偟傑偡丅
丂M5Stack偺儃僞儞傪巊偄偒偭偰偄傞偺偱丄僥儗僗僐乕僾僀乕僗僩乛僂僄僗僩栤戣傪偳偆夝寛偮偗傞偐偑壽戣偱偡丅俧俹俬俷僺儞偵僗僀僢僠傪晅偗偰寛傔傞偐偟傑偡偐側丠丂偦偆側傞偲丄宱堒戜偺曽偑僐儞僩儘乕儖偼妝側傛偆側婥偑偟傑偡丅埲慜偁偭偨價僋僙儞偺VMC110L偔傜偄偱偁傟偽丄姡揹抮摦嶌偺僗僥僢僺儞僌儌乕僞乕偲M5Stack傪巊偭偨傜丄僉儍儞僾抧偱戩忋GOTO宱堒戜傪摦嶌偝偣傜傟偦偆偱偡丅
丂偦偆偄偆惢昳偑弌偰傑偡偹(^^;)丂崅壙偩偗偳丅
R3.3.23丂VixenMT-1僗僥僢僺儞僌儌乕僞乕惂屼俆
丂僥僗僩偟偰傒偰愒宱丒愒堒偺椉儌乕僞乕偑摦偄偨偲偙傠偱愒摴媀偵憰拝偟傑偟偨丅朷墦嬀傗僂僃僀僩偑晅偄偰偄側偄偺偱偁偰偵偼側傝傑偣傫偑愒摴媀偼摦偒傑偟偨丅偨偩丄傗偼傝摦偒偼抶偄偱偡偹丅俧僐乕僪偺G1傪G0偵偡傞偲崅懍偵側傞傜偟偄偺偱偡偑丄扙挷偟傑偡丅F100偑崱偺偲偙傠摦偔忋尷偱偡丅F150偵側傞偲扙挷偱偡丅偙偙偱摦偔條巕偑尒傜傟傑偡丅
 |
 |
丂崱斢丄僼傿乕儖僪僥僗僩偟偰傒傑偡丅
丂偲偙傠偱丄M5Stack偺愱梡僗僥僢僺儞僌儌乕僞乕儌僕儏乕儖丄僗僞僢僋偱偒偰僗儅乕僩側偺偱偡偑儃僩儉傪庢傝晅偗傛偆偲偡傞偲崱傂偲偮偟偭偔傝廳側傝傑偣傫丅揹夝僐儞僨儞僒偑偄偄傛偆偵浧偭偰偄側偄偺偱丄壓偺揹抮傪彎偮偗側偄傛偆偵寠傪僇僢僞乕偱戝偒偔偟偰傒傑偟偨偑丄偳偙偐偑幾杺偟偰偄傞丅巇曽側偄偺偱丄儃僩儉偺婎斅傪庢傝奜偟丄僺儞偑側偔側偭偰偱偒傞寗娫傪僾儔僗僠僢僋斅偱傆偝偖傛偆偵偟偰傒傑偟偨丅偍偍偭両丂廳側傞丅偙偺儌僕儏乕儖丄巹偺巊偄曽偱偼敪擬偑戝偟偨偙偲偼側偄偺偱丄偦偺傑傑儃僩儉僇僶乕偱傆偝偄偱傕戝忎晇偱偟傚偆丅丠丂偲偄偆偙偲偼傕偆彮偟揹埑傪忋偘偰傒偨傜丄崅懍夞揮偑偱偒傞偐傕丠丂
 |
 |
丂斢偵僥僗僩偟傑偟偨丅嵟弶偵峴偭偨M41丅僔儕僂僗偺傎傏恀撿偵偁傞偺偱暘偐傝傗偡偄偺偱偡偑丄俀搙嬤偔撏偐側偄丅1.9搙傎偳偺朷墦嬀偺帇栰偺愭偵尒偊偰偦偆丅儌乕僞夞揮偲僗働僢僠偺曄姺掕悢傪専摙偟側偄偲偄偗側偄側丄偲巚偄傑偟偨丅
丂僆儕僆儞嵗偺儕僎儖偐傜M42傪扝偭偨傜丄恏偆偠偰帇栰偵擖偭偰偄傑偟偨丅傔偘偰偒偨偗傟偳丄僔儕僂僗偐傜M47傪慱偭偰傒偨傜丄彯峏傔偘偨偟偨丅
丂偟偐偟丄娤嶡屻偵妋擣偟偰傒偨傜丄側傫偲両丂僨乕僞偵偟偨儊僔僄偺愒堒偑旝柇偵堘偭偰偄偨(^^;)丂偳偆傕愒堒偺僨乕僞偑偁偪偙偪堘偭偰偄偨丅憗懍丄懨摉側僨乕僞偵曄峏偟傑偟偨丅
 |
丂僩儖僋偑廫暘偩偭偨偙偲偼廂妌偱偟偨丂(^^)/
R3.3.21丂VixenMT-1僗僥僢僺儞僌儌乕僞乕惂屼係
丂揷幧偺偍偭偝傫偝傫偐傜婐偟偄忣曬丅偙偙偵G-code偺堦棗昞偑偁傝傑偟偨丅偁傝偑偲偆偛偞偄傑偟偨丅奐偄偰傒傞偲丂僆僆僢両丂朿戝側検偩丅偟偐傕塸岅(^^;)丂偱傕丄擔杮岅偵曄偊傞偙偲偑偱偒偨丅(^^)
丂俀戜偺MT-1僗僥僢僺儞僌儌乕僞乕偑偁傞偺偱偡偑丄偆傑偔摦偔儌乕僞乕偲扙挷偡傞儌乕僞乕偲偵暘偐傟傑偟偨丅摨偠僗働僢僠偵傕娭傢傜偢(^^;)丂偙傟偼撪晹攝慄偑堘偆側偲悇應偟丄儌乕僞乕偺拞傪奐偄偰傒傑偟偨丅妋偐偵丄俀戜偺儌乕僞乕丄撪晹攝慄偑旝柇偵堘偄傑偟偨丅娫堘偊側偄傛偆偵敿揷晅偗丅
 |
 |
丂偙偙偱摦偔條巕偑尒傜傟傑偡丅
丂摨帪偵摦偐偡偲堏摦検乮夞揮検乯偺娭學偐扙挷偡傞偙偲偑偁傞偺偱丄弴斣偵摦偐偡傛偆偵偟傑偟偨丅嵟弶偵愒堒幉偺夞揮丄師偵愒宱幉偺夞揮丅偁偲偼幚嵺偺娤朷帪偺愒宱丒愒堒偺嵎偲儌乕僞乕偺夞揮妏搙偲偺姺嶼傪偱偒傞偩偗惓妋偵媮傔偰僗働僢僠偵偡傞偐偱偡丅偦傟偲丄僪僀僣幃愒摴媀側偺偱僥儗僗僐乕僾僀乕僗僩乛僂僄僗僩栤戣偑偁傝傑偡偹丅偦偺堄枴偐傜傕愒堒幉傪巒傔偵夞揮偝偣偰偍偄偨曽偑偄偄丅惣偐搶偐偼丄嵟弶偵僞乕僎僢僩偵偟偨峆惎偺帪妏偑僾儔僗偐儅僀僫僗偐偱敾掕偟偰傒傛偆偐側丅
R3.3.19丂VixenMT-1僗僥僢僺儞僌儌乕僞乕惂屼俁
丂栤戣偼丄GRBL僐儅儞僪丂SendCommand(STEPMOTOR_I2C_ADDR, "G1 X20Y0Z0 F100");丂偺拞偺倃偺抣偱偡偹丅偙偙偵寁嶼抣偑擖傜偹偽偄偗傑偣傫丅
丂"丂"偱埻傑傟偰偄傞偺偱丄扨弮偵暥帤楍偐丂偲偄偆偙偲偱丂String str = "G1 X" + String(deltaDec/0.108695652) + "Y0Z0 F100"; 偱偼僐儅儞僪偺拞偵偼擖傝傑偣傫丅巹偺庛偄偲偙傠偱丄曄悢丒攝楍傪棟夝偟偰偄側偄偺偱偡丅
丂僄儔乕儊僢僙乕僕傪尒傞偲丄偐偮偰傕擸傫偩偲偙傠傜偟偄偺偱丄巚偄弌偟側偑傜挷傋偨偲偙傠丄師偺傛偆側曽朄偱夝寛傪摼傑偟偨丅
偱偆傑偔摦偄偰偔傟傑偟偨丅
R3.3.19丂VixenMT-1僗僥僢僺儞僌儌乕僞乕惂屼俀
丂嶐擔偺寢壥偑椙偐偭偨偺偱丄傕偆彮偟愭偵恑傒傑偟偨丅GRBL僐儅儞僪丂SendCommand(STEPMOTOR_I2C_ADDR, "G1 X20Y20Z20 F500");丂偺懍偝500偑晄挷偺尨場偱偟偨丅偁偺摦偒偼"晄挷"偩偭偨傛偆偱偡(^^;)丂扙挷偲偄偆偙偲偱偟傚偆偐丅F100傎偳偱僗儉乕僘側摦偒偲側傝傑偟偨丅傑偨丄偁偊偰倄傗倅抣傪巜掕偡傞昁梫傕側偄偺偱偟偨乮摉慠偱偡偹丂摦偐側偐偭偨偺偼愙怗晄椙偱偟偨乯丅偝傜偵丄倃偺抣巜掕偼彫悢偱傕儅僀僫僗悢抣偱傕俷俲偱偡丅偨偩偟丄彫悢偑惓偟偔斀塮偝傟傞偺偐偼幚嵺偵惎嬻偱儌乕僞傪夞偟偰傒側偄偲暘偐傝傑偣傫丅婘忋偱偱偒側偄偙偲偱傕偁傝傑偣傫偑丄幚抧偱偺妝偟傒偵偟傛偆偲巚偄傑偡丅
丂壓偺夋憸傪僋儕僢僋偡傞偲丄摦夋傪尒傞偙偲偑偱偒傑偡丅
 |
丂寁嶼偟偰傒偨偲偙傠丄217.4儈儕昩偛偲偵"G1 X1Y0Z0 F100"偲偟偰傗傞偲峆惎帪捛旜偑偱偒偦偆偱偡丅俧俷俿俷偺応崌偵偼丄忋偺摦夋偔傜偄偺懍偝(F100)偱昁梫側愒堒嵎傪夞揮偝偣偰傗傟偽傛偄傛偆偱偡丅椺偊偽丄M110偲And兝偲偺愒堒嵎偼6.06搙側偺偱丄GRBL悢抣傪55.8偵偟偰偄偡傟偽偄偄偼偢偱偡(^^;)儂儞僩丠丂偮傑傝丄
SendCommand(STEPMOTOR_I2C_ADDR, "G1 X55.8Y0Z0 F100");丂偱偡偹丅偙偺55.8偲偄偆抣偼丄惎塤惎抍偺娤嶡巟墖僗働僢僠偺拞偱寁嶼抣偑弌偰偄傑偡偺偱丄俠儃僞儞傪墴偣偽僐儅儞僪傪憲傞傛偆偵偡傟偽偄偄傢偗偱偡(^^;)儂儞僩丠丂傑偁丄傗偭偰傒側偗傟偽暘偐傜側偄...偲偄偆偙偲偱丅
R3.3.18丂VixenMT-1僗僥僢僺儞僌儌乕僞乕惂屼
丂M5Stack偱俧俹俀愒摴媀傪帺摦摫擖偵偟偰傒傞寁夋丅M5Stack愱梡偺M5Stack梡僗僥僢僺儞僌儌乕僞乕儌僕儏乕儖偲Vixen MT-1僗僥僢僺儞僌儌乕僞乕傪寢傫偱挧愴偟偰傒傑偟偨丅寢壥丄壗偐曫婥側偔摦嶌偟傑偟偨丅巊梡偟偨僗働僢僠偼儌僕儏乕儖偺僒儞僾儖丅
丂偙傟偐傜僒儞僾儖僗働僢僠偺夝庍偲GRBL惂屼偺僐儅儞僪偲MT-1夞揮偺曄姺傪専摙偟側偗傟偽側傝傑偣傫丅 SendCommand(STEPMOTOR_I2C_ADDR, "G1 X20Y20Z20 F500");丂偱摦偔偺偱偡偑丄倃倄倅俁幉偺堏摦検偲俥懍偝傪偳偆愒宱丒愒堒幉偺夞揮検偵偡傞偐偑戝偒側壽戣偱偡丅偱傕丄偦傟偩偗側傜妝側傕偺偱偡(^^)
丂偝偰丄偙偙偵帄傞傑偱偺偙偲傪妎彂偵偟偰偍偐偹偽丄偡偖偵朰傟偰偟傑偄傑偡丅
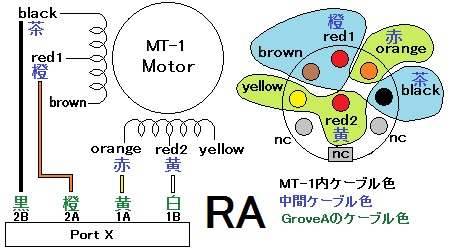
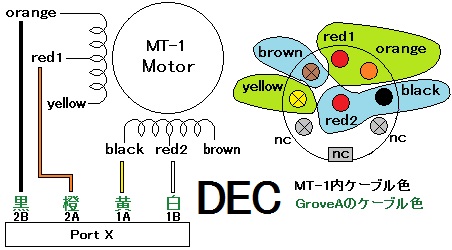
丂MT-1偺6杮働乕僽儖偺偆偪偺4杮偲儌僕儏乕儖偺4抂巕偲偳偆偮側偖偐偑桞堦擸傫偩偲偙傠偱偟偨丅傑偩傑偩専摙拞偱偡丅偙偺僗僥僢僺儞僌儌乕僞乕偺摦偒偱崌偭偰傞偐偳偆偐偼媈栤側偺偱(^^;)
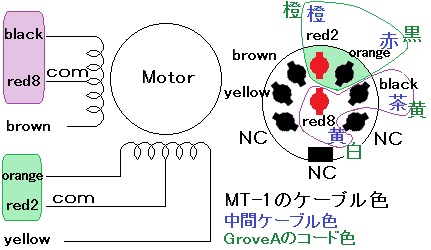
丂條巕偼丄偙偙偱尒傞偙偲偑偱偒傑偡丅
R3.3.12丂惎塤惎抍偺娤嶡巟墖僗働僢僠
丂偲偄偆傢偗偱丄M5Stack偵傛傞僗僥僢僺儞僌儌乕僞乕惂屼傪寁夋丅愱梡儌僕儏乕儖偲DIN俉僺儞僐僱僋僞傪拲暥偟傑偟偨丅撏偔慜偵丄僜僼僩偺曽傪嶌惉丅
丂偙傟傑偱偺傕偺傪棳梡偟傑偡丅尰嵼偺帇峆惎帪傪挷傋丄慜屻俀帪娫偺斖埻偱尒傞偙偲偑偱偒傞儊僔僄傪儕僗僩傾僢僾偟傑偡丅偙傟偑壓偺夋柺丅俙儃僞儞抁墴偟偱堏摦偟側偑傜慖戰丅挿墴偟偱寛掕偟傑偡丅摨帪偵夋柺曄峏丅
 |
丂師偺夋柺偵側傝傑偡丅懳徾偲側傞儊僔僄偑拞墰偵攝抲丅嬤曈偺柧傞偄峆惎傪僺僢僋傾僢僾丅塃懁偵偼丄偦偺峆惎傪慖戰偱偒傞傛偆攝抲丅偙偙偱慖傫偩峆惎傪丄朷墦嬀偱偼梊傔帇栰偵擖傟偰偍偔偙偲偵側傝傑偡丅俛儃僞儞抁墴偟偱堏摦偟側偑傜慖戰丅挿墴偟偱寛掕偱偡丅摨帪偵嵟廔夋柺偵曄峏丅
 |
丂嵟廔夋柺偱偼丄慖傫偩懳徾儊僔僄偲峆惎偺忣曬偑昞帵偝傟偰偄傑偡丅偝傜偵丄偦傟傜俀偮偺愒宱嵎丄愒堒嵎傕昞帵丅偲傝偁偊偢丄僜僼僩揑偵偼尰嵼偙偙傑偱丅屻偼丄僗僥僢僺儞僌儌乕僞乕僪儔僀僶儌僕儏乕儖偺摓拝懸偪丅
 |
丂僗僥僢僺儞僌儌乕僞乕偑偆傑偔摦偄偰偔傟傟偽丄愭傎偳偺愒宱嵎丒愒堒嵎傪儌乕僞乕僪儔僀僽偟偰朷墦嬀傪摦偐偡偙偲偵側傝傑偡丅峆惎帪捛旜偼寢峔惛搙偑昁梫偱偟傚偆偑丄扨偵摦偐偡偩偗側傜偦偆惛搙偼梫傜側偄偺偱丄娽帇娤朷掱搙偱偁傟偽廫暘偩偲巚偄傑偡丅
丂偆傑偔摦偄偨傜偄偄偺偵偹丅
R3.3.12丂惎塤惎抍偺娤嶡巟墖僗働僢僠
丂巹偺朷墦嬀偼GP2愒摴媀偱帺摦摫擖僔僗僥儉偑晅偄偰偄側偄偺偱丄娽帇娤朷偺帪偵揤懱傪帇栰偵擖傟傞偺偑擄戣偱偡丅偦偙偱丄M5Stack偱巟墖僾儘僌儔儉傪嶌惉偟偰傒傑偟偨丅
丂婛偵丄帇峆惎帪偺寁嶼傗庡側峆惎丒惎塤惎抍偺愒宱丒愒堒偺儕僗僩偑暘偐偭偰偄傞偺偱丄僗働僢僠嶌惉偼傎傏僐僺儁偱姰惉偟傑偡丅屻偼丄僠儑僐僠儑僐偺挷惍丅偙偺僠儑僐僠儑僐偑柺搢側帪傕偁傝傑偡偑丅
丂撪梕偲偟偰偼丄娤應帪偺帇峆惎帪慜屻偺愒宱傪帩偮儊僔僄揤懱傪儕僗僩傾僢僾偟丄偦偺廃曈偺柧傞偄峆惎傕昞帵偡傞偲偄偆傕偺丅埫偄拞偱惎恾偼晄梫両丂乮戝忎晇丠乯丂奜摂偑柧傞偄偺偱丄俁摍媺埲忋偺惎偟偐尒偊側偄偨傔偦偺掱搙偺惎傪昞帵偟偰僈僀僪偡傞丅偦偺峆惎傪朷墦嬀偺帇栰偵擖傟丄愒宱偲愒堒偺嵎傪庤摦(両)偱挷惍偡傞偲偄偆傕偺丅栶偵棫偮偐側丠
 |
 |
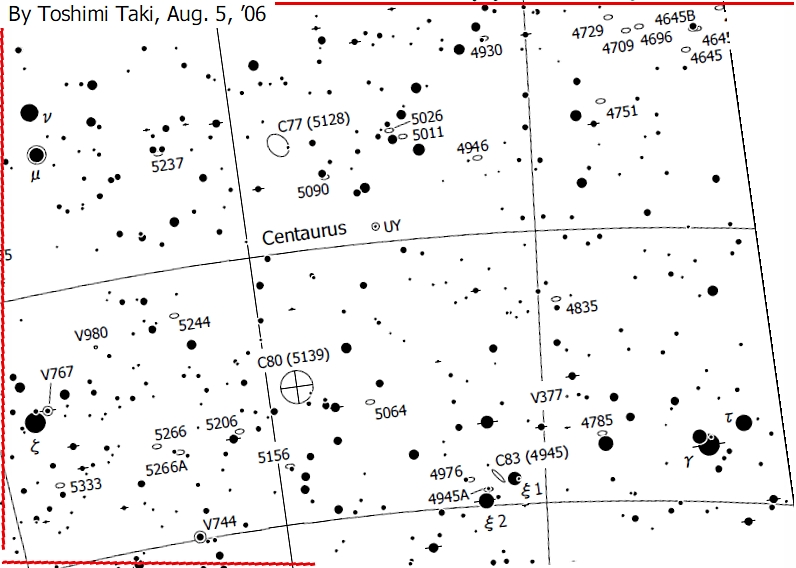
丂夵椙偟偰丄壓嵍偺夋憸偱偼嬤曈偺惎嵗巔偑暘偐傞傛偆偵峀妏偵偟偰丄惵偺儊僢僔儏俇搙妏丅壓塃偼惵儊僢僔儏俁搙妏偵偟偰徻偟偔尒傞傛偆偵偟傑偟偨丅惎嵗柤偲峆惎偺愒宱愒堒傪揧偊偰偄傑偡丅娤朷偡傞偺偼掅攞側偺偱戝嶨攃偱傕巊偊傞偱偟傚偆丅
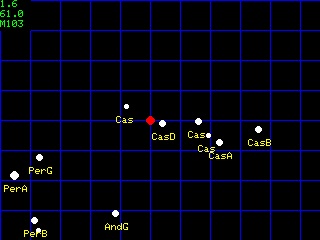 |
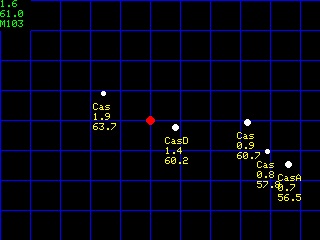 |
丂偣偭偐偔M5Stack巊偭偰傞傫偩偐傜丄惎塤惎抍偲峆惎偲偺愒宱愒堒嵎傪寁嶼偟偰丄朷墦嬀偺儌乕僞乕傪摦偐偣偨傜偄偄偺偵偲巚偄傑偡(^^;)
丂巹偺GP2愒摴媀丄愒宱儌乕僞乕偟偐偮偄偰偄側偄丅偲巚偭偨傜丄儌乕僞乕偑侾屄梀傫偱偄偨偙偲偑敾柧両丂偱偒傞偐側丠
R3.3.12丂栘惎偲壩惎偺尒偊曽
丂崱偼娤朷婜偱偼側偄壩惎偲栘惎偺條巕傪採帵偡傞僗働僢僠傪嶌偭偰傒傑偟偨丅偲偄偭偰傕丄僷儔僷儔摦夋偱偡丅梊傔夋柺傪僉儍僾僠儍乕偟偰M5Stack偺SD僇乕僪偵曐懚偟偰偍偄偰丄帪崗偵偁偭偨傕偺傪採帵偡傞偩偗(^^;)
丂PC僜僼僩偵丄Kazuto Wada丂偝傫偑嶌惉偝傟偨丂Jupiter.exe For Windows 傗Mars.exe For Windows丂偑偁偭偰丄巊傢偣偰偄偨偩偄偰偄傑偡丅夋憸偼丄Constantine Thomas' Planetary Map Site偐傜偺擖庤夋憸偵壛昅丒廋惓偝傟偨....偲偁傞偺偱偡偑丄偙偺僒僀僩偼巹偑扵偟偨尷傝尰嵼尒摉偨傝傑偣傫丅偄傠偄傠扵偟偨寢壥丄夋憸偼 https://jpl.nasa.gov 偐傜偺傕偺偱偁傞偙偲偑敾柧丅巹傕丄Cassini's Best Maps of Jupiter 偲 Map of NASA's Mars Landing Sites 偺昞戣偑偁傞夋憸傪捀偒傑偟偨丅偨偩丄偙傟傜偺夋憸傪偦偺傑傑巊偭偰傕丄Wada偝傫偺傛偆偵偼僉儗僀偵昞帵偝傟傑偣傫丅偒偭偲丄偆傑偔尭怓偟偰偁傞傫偩傠偆偲巚偄傑偡丅
 |
丂Wada偝傫偺僜僼僩偱丄拞墰宱搙偑0倛偐傜1帪娫崗傒偱昞帵偡傞傛偆偵偟偰僉儍僾僠儍乕偟偰曐懚偟偰偍偒傑偡丅M5Stack偱偼丄捈嬤偺宱搙0倛偑拞墰偵尒偊偰偄傞擔帪傪婎弨偵丄尰嵼帪崗偲壩惎偺帺揮廃婜偲傪巊偭偰寁嶼偟偰丄尰嵼壩惎偺拞墰偵尒偊偰偄傞宱搙偑壗帪側偺偐傪寁嶼偟偰丄堦斣嬤偄夋憸傪昞帵偡傞傛偆偵偟偰偄傑偡丅傑偁丄娤朷偡傞偲偒偵偳傫側柾條偑尒偊偰偄傞偐傪暘偐傟偽偄偄偩偗偺僗働僢僠偱偡丅
丂栘惎偺応崌偼堒搙偵傛偭偰暋悢偺帺揮廃婜偑偁傞偺偱偡偑丄戝愒斄偑尒偊傞偐偳偆偐傪抦傝偨偄偺偱丄偦偺廃曈偺懍搙偱寁嶼偟偰偄傑偡丅偙傟傜偺懍搙傗宱搙傕曄傢傞傛偆側偺偱丄帪乆偵廋惓偑昁梫偺傛偆偱偡丅
 |
R3.3.12丂嬥惎偺捛壛
丂嬥惎偵偮偄偰傕捛壛偟傑偟偨丅傛偔尒偊傞帪婜偑偁傝傑偡偐傜偹丅梉曽偵尒偊傞偺傕桳擄偄丅偟偐偟丄偄偮偳偺傛偆側宍偱尒偊傞偐傪抦偭偰偄側偄偲丄偄偪偄偪挷傋偹偽側傜側偄丅偲偄偆偙偲偱捛壛偱偡丅崱夞偼丄抧媴偐傜偺嫍棧傕寁嶼偝偣傑偟偨丅
 |
丂嫍棧偑1.71AU偱偡偐傜丄懢梲偺岦偙偆懁偵偄傑偡偹丅廬偭偰帇捈宎傕10昩偁傝傑偣傫丅奜崌偑嬤偄傛偆偱偡丅偟偽傜偔偼丄尒偰傕柺敀偔側偄嬥惎偱偡(^^;)
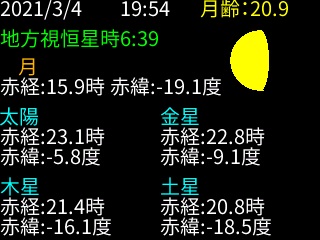
R3.3.5丂懢梲丒榝惎偺崅搙仌曽埵妏丂恾昞帵
丂偳偆偵偐揤懱偺崅搙偲曽埵妏偑寁嶼偱偒傞傛偆偵側偭偨偺偱丄尒偊傞壔偟偰傒傑偟偨丅側傫偐偦偭偗側偄攚宨偱偡偑丄懢梲偲嬥惎偑杤偟傛偆偲偟偰偄傑偡丅惣偺抧暯壓偵栘惎偲搚惎偑杤偟偰偄傑偡丅夋柺偐傜偼傒弌傞傑偱昤夋偝傟傑偡丅
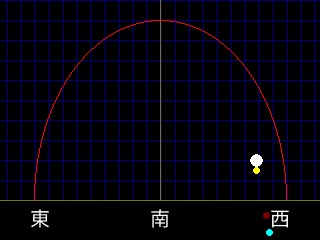 |
丂柧擔挬偺條巕偑妝偟傒偩偹丅傒傫側昞帵偝傟傞偐側丠丂帪乆峴曽晄柧偵側傞偐傜側偀乣(^^;)
R3.3.4丂懢梲丒榝惎偺崅搙仌曽埵妏
丂懢梲宯偺惎乆偺愒宱偲愒堒偑嶼弌偱偒偰偄傞偺偱丄偙傟傪傕偲偵偦偺帪娫偵尒偊傞惎乆偺崅搙偲曽埵妏傪媮傔偰傒傞偙偲偵偟傑偟偨丅
 |
丂偙傟偵偼曄姺幃偑偁傝傑偡偺偱丄偦偺捠傝偵媮傔偰偄偗偽偄偄偺偱偡丄偦偺捠傝偵丅偨偩丄偦偺捠傝偵幚尰偱偒傞偐偼丄摢偺懱憖偵側傝傑偡(^^;)
仸帪妏亖抧曽帇峆惎帪亅揤懱偺愒宱丄愒堒丗揤懱偺愒堒丄堒搙丗娤應抧偺堒搙
丂婛偵抧曽帇峆惎帪偲奺揤懱偺愒宱丒愒堒偼媮傑偭偰偄傑偡丅廬偭偰丄忋偺俁偺幃偺塃曈偵抣傪戙擖偟偰丄媮傑偭偨抣偺arcsin傪庢傟偽崅搙偑媮傑傝傑偡丅媮傑偭偨崅搙傪侾偺幃偵戙擖偟偰傗傟偽曽埵妏偑媮傑傞偲偄偆偙偲偱偡丅
丂傗偭偰傒偨寢壥偑壓偺捠傝丅傔偪傖傔偪傖偱偟偨(^^;)
 |
丂姷傟偰偄傞恖偼偍敾傝偱偟傚偆偑丄M5Stack夋柺昞帵偼妏搙扨埵偱昞帵偟偨偄偺偱偡偑丄僗働僢僠撪偺嶰妏娭悢偱巊偆悢抣偼儔僕傾儞傪巊偄傑偡丅偝傜偵丄arcsin傪庢偭偨帪偵偼媮傑傞夝偑俀偮偁傝傑偡丅戞侾徾尷偲戞俀徾尷偵丄偁傞偄偼戞俁徾尷偲戞係徾尷偵弌偰偒傑偡偹丅偩偐傜丄弌偨抣偵傛偭偰偦傟偑亅俀侽搙側偺偐亅侾俇侽搙側偺偐丄偁傞偄偼俀侽侽搙側偺偐俁係侽搙側偺偐傪敾掕偝偣傞僗働僢僠偑昁梫偱偡丅乮娫堘偊偰側偄偐側丠乯
丂傑偨丄嵟弶偐傜寁夋揑偵僾儘僌儔儉傪慻傑偢丄偩傫偩傫偲愊傒廳偹偰乮僗僞僢僋偟偰(^^;)乯偒偨僗働僢僠側偺偱丄忋偵嫇偘偨揤懱偺僨乕僞偑偳偆偄偭偨庬椶偺曄悢偵偟偰偄傞偺偐丄僌儘乕僶儖曄悢偵偟偰偍偗偽椙偐偭偨偺偵丄壗婥側偔娭悢偺拞偱掕媊偟偰偟傑偭偨偺偐....丂僾儘僌儔儉偺棳傟傕娷傔偰慡懱峔憐偑昁梫偱偟偨(^^;)
丂傑偁丄偦傟偱傕戝偒側僗働僢僠偱偼側偄偺偱丄廋惓偼偱偒傞偱偟傚偆丅堦墳丄僄僋僙儖偱偺僔儏儈儗乕僔儑儞偱偼偄偄寢壥偵側偭偨偺偱(^^)
丂側偍丄崱夞偺偙偲偱擔杮岅昞帵曽朄傪曄峏偟傑偟偨丅
丂String filename ="/marugotic16";
丂M5.Lcd.loadFont(filename,SD);
丂偙傟傪巊偆偲丄僐儞僷僀儖偺帪偵僄儔乕偡傞偙偲偑柍偔側傝傑偟偨丅傑偨丄僥僉僗僩僇儔乕傪巜掕偡傞偲偒偼丄攚宨怓傕巜掕偡傞偲暥帤偑僗僢僉儕昞帵偝傟傑偡丅
丂M5.Lcd.setTextColor(WHITE,BLACK);
R3.2.28丂懢梲宯埵抲娭學傪抦傞
丂栘惎偺埵抲傪寁嶼偱偒傞傛偆偵側偭偨偺偱丄摨條偺寁嶼曽朄傪巊偭偰嬥惎丒搚惎丒懢梲偺埵抲傕寁嶼偱偒傞傛偆偵側偭偨丅恾拞丄嬥惎偺愒宱偑嬻棑偵側偭偰偄傞偗傟偳丄倷嵗昗傪130僪僢僩偺偲偙傠傪1340僪僢僩偲巜掕偟偰偟傑偭偰夋柺奜偵偼傒弌偟偨偙偲偑尨場(^^;)丂
 |
丂忋偺寢壥傪棙梡偟偰丄庤彂偒偱擔偺弌帪偺條巕傪昤偄偰傒偨丅偙傫側嬶崌偵側偭偰偄傞傛偆偩丅挬婲偒偑抶偔側偭偨偺偱妋擣偱偒偰偄側偄(^^;)
 |
丂奺揤懱偺愒宱愒堒傪寁嶼偱偒傞傛偆偵側偭偨偺偱丄偙傟傪慡揤峆惎帪偵僾儘僢僩偟偰傒偨丅偙傟傕揤懱偺愒宱愒堒偲M5Stack夋柺偺嵗昗曄姺偑偱偒偰偄傞偺偱丄娙扨偵昞帵偡傞偙偲偑偱偒偨丅
丂傕偭偲傕丄寁嶼幃傪娫堘偊偰丄屵屻偺條巕偼僾儘僢僩偱偒偨偑丄梻擔偵側偭偨傜丄崥慠偲係偮偺揤懱偑徚偊偨両丂偲偄偆戝帠審偑婲偒偨...偙偲傕偁傞(^^;)
 |
 |
丂揤媴偼墌宍丒媴宍側偺偱丄M5Stack夋柺偱傕墌宍傪堄幆偟偨昤夋傪偡傞偺偑椙偄偺偐傕偟傟側偄偑丄嵗昗曄姺幃偑柺搢偵側傞偺偲丄彫偝偄夋柺傪僼儖偵巊偭偨曽偑偄偄偲偄偆偙偲偱儊儖僇僩儖晽偵偟偰偄傞丅
R3.2.23丂榝惎埵抲傪抦傞
丂寧椷傪寁嶼偱偒傞傛偆偵側傞偲丄埲慜偐傜寽埬偱傎傏掹傔偐偗偰偄偨乽榝惎埵抲寁嶼乿傕偱偒傞傛偆側婥偑偟偰偒偨丅偦偙偱丄挧愴丅
丂奀忋曐埨挕偝傫偑岞奐偟偰偄傞僨乕僞偲愢柧傪巊偭偰傗偭偰傒傑偟偨丅奀梞忣曬晹僩僢僾 > 奀偺忣曬 >揤暥丒楋忣曬 偵擖偭偰壓偺曽傊偄偔偲乽僐儞僺儏乕僞偵傛傞揤懱偺埵抲寁嶼幃乿偑尒偮偐傞偺偱丄偙傟傪棙梡偟傑偡丅
丂戝傑偐偵偼師偺傛偆側棳傟乮榝惎偺愒宱丒愒堒偺傒媮傔傑偟偨乯
仸cos-1丗傾乕僋 僐僒僀儞偺偙偲偹
係丏揤懱偺愒宱丒愒堒傪媮傔傞丂偺偲偙傠偱丄2021擭梡偵偼榝惎偛偲偵俁捠傝乮係僇寧娫乯偺僨乕僞楍偑偁傝傑偡丅娤應擔偺擭寧擔偑偁偨傞楍傪寛掕偟傑偡丅恖娫偱偡偲丄尒偰暘偐傝傑偡偑M5Stack偵敾掕偝偣傞傢偗偱偡偹丅奺楍偵偼丄C0偐傜C17峴傑偱愒宱丄愒堒丄嫍棧偛偲偵僨乕僞偑擖偭偰偄傑偡丅C0 + C1cos兤 + C2cos 2兤 + 丒丒丒 + C17cos 17兤偲偟偰憤榓傪媮傔傞偲丄愒宱丄愒堒丄嫍棧枅偺抣偑摼傜傟傞傛偆偱偡丅
丂偙偺暥彂偵偼丄愰尵側偔曄悢偑巊傢傟偰偄傞偙偲偑偁傝丄堦斒恖偺巹偵偼 ??? 偲側偭偰偟傑偆偺偱偡偑丄幃偺捠傝偵僗働僢僠傪慻傫偱僐儞僷僀儖偟偰傒傞偲丄壗偲側偔丂崙棫揤暥戜 > 楋寁嶼幒 > 楋徾擭昞 > 榝惎偺抧怱嵗昗偱帵偝傟傞傕偺偲偩偄偨偄崌偭偰偄傞傛偆側偙偲偵側偭偨偺偱丄椙偟偲偟傑偟偨(^^;)
 |
丂偙傟偑偱偒傞偲側傞偲丄懠偺榝惎傗懢梲偺埵抲傪寛傔傞偙偲偑偱偒傞偺偱丄偙傟傑偱傗偭偰偒偨惎嵗憗尒斦偲慻傒崌傢偣偰M5Stack梡偺巊偊傞惎嵗憗尒斦偑偱偒偦偆偱偡丅偟偐偟丄側偵傇傫偵傕夋柺偑彫偝偄両丂幚梡揑偱側偄偱偡偹(^^;)丂偦傟偵丄崱夞偺榝惎埵抲寁嶼丄寁嶼僨乕僞偑枅擭峏怴偝傟傞偟.....(^^;)
R3.2.21丂寧楊傪抦傞
丂埲慜偐傜擟堄偺寧楊傪抦傝偨偄側丄偲巚偭偰僱僢僩専嶕偟偰偄偨偗傟偳丄傆偲婥偑晅偄偨丅峆惎帪偺僾儘僌儔儉傪彂偗偰偄傞傫偩偐傜丄偙傟傪棙梡偱偒側偄偐偲偄偆偙偲丅
丂偮傑傝丄捈嬤偺怴寧偺擔帪傪抦偭偰偦偺帪偺儐儕僂僗捠擔傪寁嶼偡傞丅偙傟傪婎弨偲偡傞丅師偵丄擟堄偺擔帪偺儐儕僂僗捠擔傪寁嶼偟偰婎弨偲偺嵎傪媮傔傞丅偦偺嵎偑寧楊偲側傞丅傕偪傠傫擔偵偪偑宱偭偰偄傟偽戝偒側寧楊偲側偭偰偟傑偆偑丄暯嬒嶑朷寧乮崱夞偼丄29.53擔偲偟偨乯埲撪偵側傞傑偱尭嶼偟偰傗傟偽丄偦傟偑寧楊丅
 |
丂幚幨斉偺寧柺傪巊偭偰傕偄偄偑丄僼傽僀儖偑懡偔側傞偺偱僗働僢僠偺拞偱昤夋偡傞偙偲偵偟偨丅
丂枮寧傪墿怓偱昤偒丄寚偗嵺傪寧楊乛暯嬒嶑朷寧偲偟偨傕偺偺梋尫傪庢傞丅怴寧偐傜忋尫丄枮寧丄壓尫丄師偺怴寧偲係偮偵応崌暘偗偟丄敿暘傪崟揾傝偟偨傝丄懭墌偱拞傪崟揾傝or墿揾傝偟偨傝偟偰傒偨丅崱偺偲偙傠偼惓忢偵昤偄偰偄傞傛偆偩丅
R3.2.17丂娤揤朷梡惎恾
丂寉曋側俉們倣朷墦嬀傪嶌惉偟偨偺偱丄堦悺尒梡偺惎恾傪M5Stack偱幚尰偟傛偆偲峫偊偨丅傑偢偼丄戧偝傫偑嶌傜傟偨戧惎恾傪M5Stack偵擖傟偰丄俁抜奒偺奼戝棪偱巊梡偟傛偆偲峫偊丄僗働僢僠傪嬦枴丅僞僽儗僢僩傗僗儅儂乮巹偺偼Jelly_Pro偩偐傜彫偝偄(^^;)乯偱尒傟偽偄偄傫偩傠偆偗偳丄偳偙傑偱傕庤寉偵両偲偄偆偙偲偱.....
 |
丂徻偟偔尒傞昞帵丅偟偐偟丄偙傟傪傗傞偵偼M5StackCore2偑曋棙偩傠偆側偀丅僞僢僠僷僱儖偩偐傜丅
 |
丂M5StackCore2傪峸擖偡傞傑偱奼弅偼幪偰偰丄惎塤丒惎抍摍傪摫擖偡傞婎弨惎偑擖傞傛偆偵丄儊僔僄僇僞儘僌偺80屄傎偳傪僠儅僠儅偲惎恾偐傜愗傝偩偟偰傒偨(^^;)丅偝傜偵丄娤嶡帪偺峆惎帪傪寁嶼偟偰丄偦偺嬤偔偺愒宱偵埵抲偡傞惎塤丒惎抍偐傜昞帵偡傞傛偆偵偟偰傒偨丅
 |
丂抔偐偔側偭偨傜丄壴暡傪旔偗偰俉們倣朷墦嬀偱帋偟偰傒傛偆偲巚偆丅侾係們倣斀幩傕巊偭偰尒斾傋偰傒傛偆丅偨偩丄偙偺椉幰偼摨偠傛偆側尒偊曽偩丅價僋僙儞偺侾俆們倣斀幩偼傛偔尒偊傞偺偱丄偙傟傕僪僽僜僯傾儞壦戜傪嶌偭偰傒偰傒傛偆偐偲巚偭偰偄傞丅
R2.7.12丂慡揤峆惎恾丂姰椆
丂崱傑偱偺憤傑偲傔偲偟偰丄慡揤峆惎恾傪昤偄偰傒傑偟偨丅峆惎帪偲楢実偟傑偟偨丅攚宨偼嶐擔張棟偟偰偍偄偨偺偱丄偁偲偼峆惎偺僾儘僢僩偩偗偱偡丅夋柺偺嵗昗偺曽岦偲丄峆惎偺愒宱偑媡偵側偭偰偄傞偙偲偲丄夋柺偺拞墰偵峆惎帪偑帵偡愒宱偑偔傞傢偗偱丄偦偙偺張棟偑偆傑偔偄偗偽栤戣偁傝傑偣傫丅偙偺曈丄崅楊幰偺巹偵偲偭偰挌搙椙偄擼僩儗側傫偱偟傚偆偹(^^;)丂偁傫傑傝擄偟偔偰夝寛偱偒側偄偲僗僩儗僗偑棴傑偭偰偟傑偆.....
丂曽朄偲偟偰偼丄峆惎傪僾儘僢僩偡傞嵺偵丄峆惎帪偐傜奺峆惎偺愒宱傪尭偠偨傕偺偵愒宱丒夋柺僪僢僩姺嶼抣乮320/180乯傪忔偠傑偡丅偙傟傪壖偵倸偲偟傑偡丅
丂峆惎帪偱偁傞拞墰乮夋柺偺x=160僪僢僩乯傛傝傕丄彫偝側愒宱惎乮=惣偵偁傞惎乯偼 160+倸 偲偟傑偡丅
丂峆惎帪偱偁傞拞墰傛傝傕丄戝偒側愒宱惎乮=搶偵偁傞惎乯偼 160-倸 偲偟傑偡丅幃偲偟偰偼丄160+(峆惎帪-奺峆惎偺愒宱)*(320/180乯 偱偄偄偱偡偹丅
丂崱偺偲偙傠惎乆偼昞帵偝傟偰偄傑偡偑丄峆惎帪偺嬶崌偵傛偭偰偼惎偑昤偐傟側偔側偭偨傝偟偰.....偦傫側偙偲偁傞偐側丠
 |
丂堦墳偙傟偱廔椆偱偡丅庤彂偒偺偨傔丄墿摴偑曄側嬋慄偵側偭偰傑偡丅偙傟偖傜偄偼廋惓偡傞偐側(^^;)
R2.7.11丂慡揤峆惎恾
丂僱僢僩偐傜偼巚偭偨埲忋偵峆惎僨乕僞傪僎僢僩偡傞偙偲偑偱偒偨偺偱丄慡揤峆惎恾偵挧愴偱偡丅嬤偄彨棃偵偼丄峆惎帪偲楢実偟傛偆偲巚偭偰偄傑偡丅
丂僨乕僞傪傕偲偵偟偰偺峆惎僾儘僢僩偼妝偱偡丅崱夞偼丄摿偵妝側捈岎嵗昗傪巊偄傑偟偨丅偨偩偱偝偊嫹偄M5Stack偺夋柺偱偡偐傜彮偟偱傕桳岠偵巊偄偨偄両丂偲偄偆傢偗偱娙扨側儊儖僇僩儖恾朄丅峆惎偺僗儁僋僩儖僨乕僞傕僎僢僩偟偨偺偱丄怓傕晅偗偰傒傑偟偨丅偨偩丄愒堒慄傗愒宱慄丄揤偺愳側偳偼昤夋偟偵偔偄偺偱丄梊傔jpg僼傽僀儖偵昤偄偰偍偄偰丄擟堄偺峆惎帪偵懳墳偱偒傞傛偆偵偟傑偟偨丅廲偼240僪僢僩偱偡偑丄墶傪1300僪僢僩傎偳偵偟偰偍偒丄偼傗傇偝偝傫偺夋憸張棟偺儁乕僕偱妛傫偩僆僼僙僢僩巜掕偱昞帵偡傞傛偆偵偟偰偄傑偡丅偦偺攚宨偺忋偵峆惎傪僾儘僢僩偡傞傢偗偱偡丅偙偙偱尒傞偙偲偑偱偒傑偡丅
丂俁摍媺傑偱丄係摍媺傑偱丄俆摍媺傑偱偲俁捠傝偺昞帵偑偱偒傑偡偑丄傗偭傁傝惎悢偑懡偄曽偑鉟楉偵巚偊傑偡丅
丂榝惎偺埵抲昞帵側傫偰偺偑偱偒偨傜丄栶偵棫偮僗働僢僠偵側傝傑偡偑丄揇徖偵側傝偦偆偩偐傜丄傗傔偰偍偙偆丠
R2.7.8丂抧曽帇峆惎帪
丂峆惎帪寁嶼偑偱偒偨偺偱丄婥傪傛偔偟偰惎嵗偺摦偒傪栚偱尒傞偙偲偑偱偒傞傛偆偵挧愴丅偲偄偭偰傕M5Stack偺夋柺偱偡偺偱杒揤惎嵗丅亄俉俇搙埲忋偺惎嬻傪侾侽摍媺傛傝柧傞偄惎嬻偱昤夋偟傑偡丅
丂ArduinoIDE偵偼嶰妏娭悢偑側偄側偁乣丂偲巚偭偰偄偨傜丄偁偭偨偺偱(^^;)丄偦傟傪巊偭偰昤夋偟傑偡丅
丂僸僢僷儖僐僗惎昞偐傜昁梫側惎偺僨乕僞傪庢偭偰偒傑偡丅侾俀俁屄偺峔惉僨乕僞傪僎僢僩丅柧傞傔偺惎偺偄偔偮偐偺僗儁僋僩儖宆傪挷傋偰攝楍偵擖傟偰偍偒傑偡丅M5Stack偺夋柺拞墰傪揤偺杒嬌偲偟偰嬌嵗昗傪捈岎嵗昗偵曄姺偟偰僾儘僢僩偟偰偄偒傑偡丅偄偮傕偺傛偆偵(^^;)嶰妏娭悢偵擖傟傞悢抣傪儔僕傾儞偵偟側偐偭偨偺偱丄昤夋偝傟偨惎恾偵丄栚偑揰両丂忬懺丅偦偆偦偆丄妏搙偠傖偄偗側偐偭偨偲丄廋惓丅妏搙偵0.01745傪偐偗傟偽偄偄偺偱偡丅
丂偡傞偲丄乽傎乣乿偲夋憸偑弌偰偔傞丅傎傫偺侾侽屄傎偳偱傕丄惎偵怓偑偮偔偲鉟楉乮帺屓枮懌乯丅偟偐偟丄偙偙偐傜偑栤戣丅偳偺傛偆偵偟偰峆惎帪偲惎乆偺夞揮傪崌傢偣傞偐偲偄偆偙偲丅
丂帺暘偱傕偦偺帪偺慚偒乮偭偰傎偳偱傕側偄偗偳乯傪婰壇偟偰側偄偺偱丄倶嵗昗偲倷嵗昗偺寛傔偨幃傪嵹偣偰偍偒傑偡丅
cos((愒宱+(270-峆惎帪))*0.01745)*(90-愒堒)*40+160,
sin((愒宱+(270-峆惎帪))*0.01745)*(90-愒堒)*40+120,
乽270-峆惎帪乿偑寛傔庤偱偟偨丅俹俠傗M5Stack偺夋柺偼丄悢妛偱巊偆嵗昗偲偼堎側偭偰180亱夞揮偟偰壓傪岦偄偰偄傑偡丅偝傜偵丄峆惎帪偲偼丄撿拞偡傞愒宱偑昞偡帪崗丅M5Stack夋柺偱偼拞墰偐傜忋偺慄偑偦傟偱偡偹丅偗傟偳丄惎傪昤偄偨帪偺婎弨乮愒宱侽亱乯偼拞墰偐傜塃曽岦丄偮傑傝偼俀俈侽亱偢傟偰偄傞丅偙傟傪偳偆偵偐偡傟偽堦抳偡傞両丂偲偄偆巚偄崬傒偱傗偭偰傒傑偟偨(^^;)丂寢壥偼戝惓夝丅偦傟偱丄姰惉偟偨偺偑壓偺夋憸丅
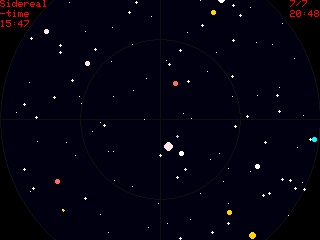 |
丂挷巕偵忔偭偰傾僯儊乕僔儑儞偟偰傒偨傜丄攚宨偵庒姳怓傪晅偗偰偄偨偨傔偐僠儔偮偒偑嫮偐偭偨偱偡丅恀偭崟偵偡傞偲偄偄暤埻婥偵偼側傝傑偟偨偑丄偦傫側偵尒懕偗傞傕偺偱偼側偄偺偱丄惷巭夋偵偟偰偄傑偡丅
丂偙偙偱尒傞偙偲偑偱偒傑偡丅
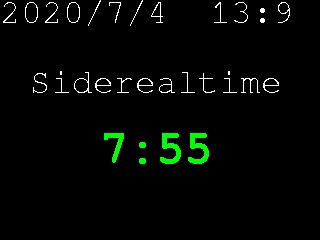
R2.7.4丂抧曽帇峆惎帪
丂埲慜丄SmallBasic偱峆惎帪傪寁嶼偝偣偰僾儘僌儔儉傪嶌惉偟偰偄傑偟偨丅偦偺僾儘僌儔儉傪ArduinoIDE偺僗働僢僠偵堏怉偟傛偆偲峫偊傑偟偨丅偨偩丄IDE偺曄悢偺偙偲傪偁傑傝棟夝偟偰偄側偄偨傔偵偆傑偔偄偒傑偣傫偱偟偨丅偟偐偟丄巊偆悢抣曄悢偺偡傋偰傪double宆偵偟偰丄昞帵傗寁嶼帪偺昁梫側帪偵int宆偵曄姺偝偣偰傗傞偲偆傑偔偄偒傑偟偨(^^)/
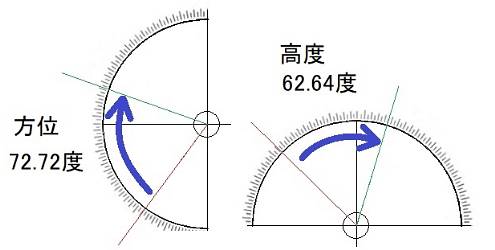
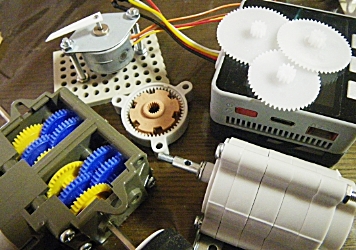
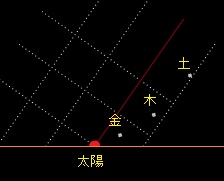
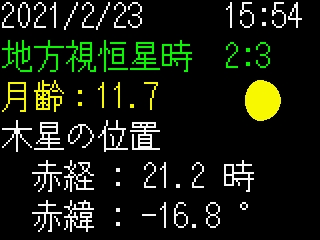
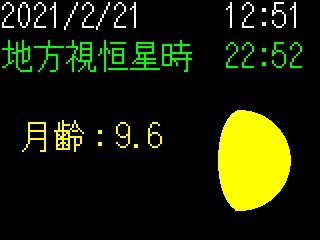
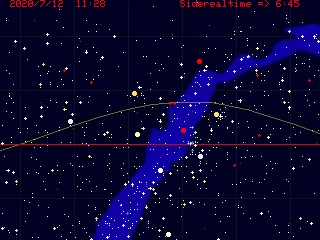
巊偭偨偺偼丄乽僂傿僉儁僨傿傾乮Wikipedia乯乿偺乽峆惎帪乿偺拞偺乽峆惎帪偺寁嶼朄乿傪巊偄傑偟偨丅壓嵍偺夋憸偑偦偺寢壥丅
 |
 |
丂忋塃偺夋憸偼丄偙偺寁嶼幃偑巊偊傞傛偆偵側傞慜丄傾僶僂僩偱寁嶼偡傞曽朄偱幚尰偟偨傕偺偱偡丅
丂暋嶨側寁嶼傪偡傞傑偱傕側偔丄婫愡偵傛偭偰尒傞惎嬻偼偝偟偰曄傢傜側偄丅惛枾側娤應偱側偄偺側傜丄傾僶僂僩偱偄偄傢偗偱偡偹(^^;)丂枅寧偺侾擔俀侽帪偺抧曽帇峆惎帪傪攝楍偵擖傟偰偍偒傑偡丅偙偺抧曽帇峆惎帪傪寁嶼偟偰偔傟傞僒僀僩偑偁傝傑偡偺偱丄偦偙偐傜摼偰偒傑偡丅
丂俀侽帪偲偄偆帪崗傪屌掕偡傞偲丄侾擔宱偮偛偲偵愒宱偼273昩憹壛偟傑偡丅傑偨丄摨偠擔偱偁傟偽侾帪娫宱偮偛偲偵愒宱偼3610昩憹壛偟傑偡丅
丂僒乕僶乕偐傜擔帪傪摼偰丄攝楍偵擖傟偨偦偺寧偺侾擔俀侽帪偺峆惎帪傪妋掕偟傑偡丅偝傜偵丄忋偺俀偮偺僨乕僞傪巊偭偰丄曄姺偟偰傗傞偲丄娙扨偵擟堄偺抧曽峆惎帪傪抦傞偙偲偑偱偒傑偡丅傕偪傠傫抧堟尷掕偱偡偑丄宱搙偝偊傢偐傟偽慡崙偺抧揰偱偺抧曽帇峆惎帪傪嶼弌偡傞偙偲偑偱偒傑偡丅
R2.6.30丂儊僔僄僇僞儘僌
丂嵟嬤偼惎嬻傪尒偰偄側偄偟丄幨恀嶣塭傕偟偰偄側偄丅偦偙偱丄抔偐偔側偭偰偒偨偺偱妶摦傪嵞奐偟傛偆偐偲巚偄傑偡丅抔偐偄偳偙傠偐丄弸偔側偭偰偒偰偄傞偺偩偗傟偳丅
丂傑偢偼丄偳偙傑偱嶣塭偟偰偄傞偐丅儊僔僄僇僞儘僌傪妋擣丅妋擣傪偡偖偵偱偒傞傛偆偵M5Stack偱峴偆偙偲偵偟傑偡丅偦傟偑丄壓偺夋憸丅嶣塭偟偰偄傞傕偺偼丄偦偺幨恀偑弌傞丅嶣塭偟偰偄側偄傕偺偼惎恾偑弌傞傛偆偵偟傑偡丅
 |
 |
丂嶣塭偟偰偄側偄惎塤丒惎抍傪妋擣偡傞暿偺僗働僢僠傕峫偊傑偟偨丅偁偲俁俈屄偁傝傑偡丅愒堒丒愒宱丄摍媺傗峀偝側偳傪昞帵偟丄惎恾偲惎塤丒惎抍偺夋憸傪擖傟傑偡丅
 |
 |
丂怮傞偲偒偵偙傟傪尒偰丄崱搙偼偙傟傪慱偍偆両丂偲堄梸晅偗偺偨傔偵M5Stack傪妶梡偟傑偡丅
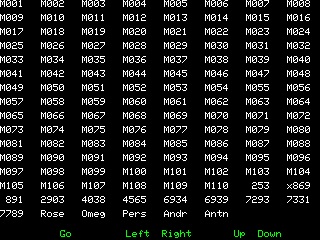
R2.6.27丂惎嵗憗尒斦
丂嵟嬤偼M5Stack偵幏怱偟偰偄傞偺偱丄揤暥偲偼偛柍嵐懣偵側偭偰偄傑偟偨丅偗傟偳丄嫽枴偼悐偊偰偄側偄丅崱壗偑尒偊傞偐側偲丄惎嵗憗尒斦傪巊偆偺偩偗傟偳丄M5Stack偱幚尰偟偰傒傛偆偲庢傝慻傒傑偟偨丅
丂windows偺曣娡偱偼SmallBasic偱嶌偭偰偄偨偺偱丄偦偺偍偍傕偲偺慡揤峆惎夋憸傪巊偊偽傛偄偩傠偆丅偨偩丄SmallBasic偱偼夋憸偺夞揮偑偱偒偨偗傟偳丄M5Stack偱偼偦傫側儔僀僽儔儕偼側偄(丠乯偩傠偆偲偄偆偙偲偱丄偪傑偪傑偲敿寧枅偺惎恾偵壛岺偟偰bmp夋憸偵偟偨傕偺傪昞帵偡傞偙偲偱幚尰偟傑偟偨丅
丂僱僢僩偐傜擔偵偪傪僎僢僩偟偰丄偦偺寧偺夋憸傪昞帵偟傑偡丅俠儃僞儞抁墴偟偲挿墴偟偱敿寧枅偺擔晅傪峴偭偨傝棃偨傝丅枹幚憰偱偡偑丄俙儃僞儞偱帪崗偺曄峏傪偡傞梊掕偱偡丅偦傟偵偟偰傕M5Stack偺夋柺偼彫偝偡偓傑偟偨偹(^^;)
偙偙偱尒傟傑偡丅
