 |
 |
 |
H30.11.12丂俢俠儌乕僞乕僶僊乕丂僗儅儂偱憖嶌
丂偄傠偄傠僥僗僩偟偰傒偰晄妋偐偩偑僗儅儂偲儅僀僋儘價僢僩傪儁傾儕儞僌偡傞偙偲偵姷傟偰偒偨丄傛偆偩丅寢榑偲偟偰偼丄儅僀僋儘價僢僩偵僀儞僗僩乕儖偡傞僾儘僌儔儉偑戝偒偐偭偨傜僟儊傒偨偄丅娙扨側僾儘僌儔儉偼栤戣側偔儁傾儕儞僌偱偒偨丅俢俠儌乕僞乕偲僗儅儂忋偺僎乕儉僷僢僪傪棙梡偟偨僾儘僌儔儉偔傜偄傕栤戣側偔儁傾儕儞僌偱偒偨丅偗傟偳丄俁俇侽搙僒乕儃儌乕僞乕偱憱傝側偑傜俙俿俹俁侽侾侾偵儔儞僟儉偵侾侽僼儗乕僘傎偳偍挐傝偝偣傞偲偐丄俛俵俤俀俉侽偺僨乕僞傪庢傞偲偐傪慻傒崬傫偱偟傑偭偨僾儘僌儔儉偱偼丄儁傾儕儞僌偺嵟屻偺偲偙傠偱偮側偑傜側偄偺偩偭偨丅儅僀僋儘價僢僩偺儊儌儕乕椞堟偑懌傝側偔側偭偰偄傞偺偩傠偆偐丅
丂偲傝偁偊偢儁傾儕儞僌偱偒偨俢俠儌乕僞乕偱摦偄偰偄傞摦夋傪偙偙偱尒傞偙偲偑偱偒傑偡丅
丂傑偨丄儁傾儕儞僌偺庤弴傪徻嵶偵偨偳偭偨妎彂傪栘梛擔傑偱偵偼採帵偱偒傞偲巚偄傑偡丅
H30.11.10丂俢俠儌乕僞乕僶僊乕
丂偄傗偄傗擸傒傑偟偨丅曅曽偺儌乕僞乕偑巚偆捠傝偵側傜側偄丅揹尮傪擖傟偨傜捈偖偵摦偒偩偡丅惓揮偼偱偒傞偑媡揮偑偱偒側偄丅偲偄偆徢忬偱偟偨丅攝慄仌敿揷晅偗偼偱偒偰偄傑偟偨傛丅
丂偟偐偟丄傆偲巚偭偰儅僀僋儘價僢僩偺僺儞傪岎姺偟偰傒傑偟偨丅僽儗乕僋傾僂僩婎斅偺攝抲偱丄傑偲傑傝偑椙偐偭偨P16偲I2C偺P1920傪巊偭偰偄偨偺偩偗傟偳丄偙傟偑幐攕偺尨場偱偟偨丅壗傕懠偵巊偭偰偄側偄P8丒P12丒P16偺3杮偺僺儞傪巊偭偨傜丄僐儞僩儘乕儖偱偒傞傛偆偵側偭偨偺偱偡丅I2C偺僺儞偼撪晹偱壗偐傗偭偰偄傞偺偐側丅儔僘儀儕乕僷僀偱偼I2C僺儞傪懠偺梡搑偱傛偔巊偭偰偄偨偺偱偙傟偭傐偭偪傕儅僘僀偲偼峫偊側偐偭偨両
|
|
|
丂悈暯偵弌偡婎斅偑梋偭偰偄偨偺偱偙傟傪巊偄丄偦偺壓偵儌乕僞乕僪儔僀僶丅揹尮偲偟偰偺姡揹抮偼幵懱偺棤偵庢傝晅偗偨丅
丂偨偩丄嵍塃偺儌乕僞乕偺弌椡偑偳偆傕庒姳堘偆偺偱丄恀偭捈偖恑傑側偄偺偑擄揰丅PWM偺抣傪嵍塃偱曄偊傞偐側丠丂偙傟傪僐儞僩儘乕儖偡傞偺偵傕偆堦戜儅僀僋儘價僢僩傪峸擖偡傞偐側丠丂堦搙偩偗丄僗儅儂偱僐儞僩儘乕儖偱偒偨偺偑朰傟傜傟側偄偺偩偗傟偳.....
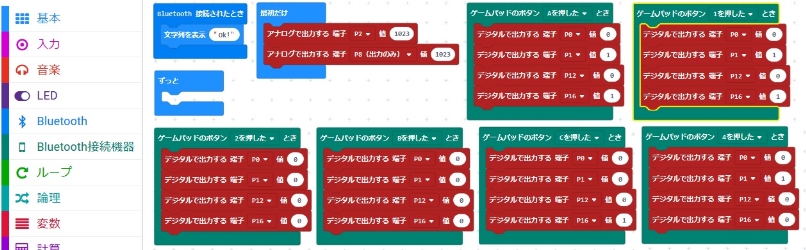
丂僗儅儂偱僐儞僩儘乕儖偡傞偙偲偑偱偒偨両丂朰傟偰偟傑偆偺偱丄妎彂丅
丂僽儘僢僋偱僾儘僌儔儉偡傞偲偒偵偼丄捛壛僷僢働乕僕偱Bluetooth偲Bluetooth愙懕婡婍傪僟僂儞儘乕僪偟偰偍偔丅乽嵟弶偩偗乿偵P2丒P18僺儞偵妱傝怳傞PWM怣崋傪傾僫儘僌偱抣傪巜掕偡傞丅偙偺帪丄嵟戝偼1023側偺偱丄壛尭偡傟偽捈慄偱憱傞偙偲偑偱偒傞偐傕偟傟側偄丅
丂儌乕僞乕傊偼P0丒P1偲P12丒P16偺俀僙僢僩偱俀偮偺儌乕僞乕傪僐儞僩儘乕儖偟偰偄傞丅僨僕僞儖偺抣侽偐侾偱巜掕偡傞偺偩偑丄儌乕僞乕偵偮側偘傞俀杮偺攝慄傪曄偊傟偽丄惓揮丒媡揮傕曄傢偭偰偟傑偆偺偱丄婥傪偮偗傞丅
丂栤戣側偺偼丄僾儘僌儔儉傪曄峏偟偰儅僀僋儘價僢僩偵僟僂儞儘乕僪偟偨傝丄儅僀僋儘價僢僩偺揹尮傪愗偭偨傝偡傞偲丄傕偆僗儅儂偼儅僀僋儘價僢僩傪擣幆偟偰偔傟側偄偺偱丄嵞搙儁傾儕儞僌偡傞昁梫偑偁傞丅偙偺帪丄慜夞儁傾儕儞僌偟偨儅僀僋儘價僢僩傪嶍彍偟側偗傟偽側傜側偄丄偲巚偆偑偳偆偩傠偆丅柺搢側偺偱丄偁傑傝巊傢側偄偐傕偟傟側偄丅
 |
