 |
 |
 |
 |
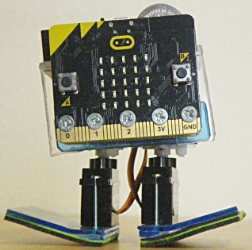
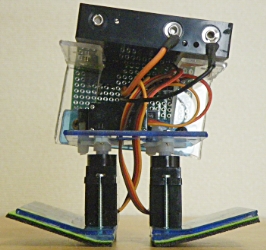
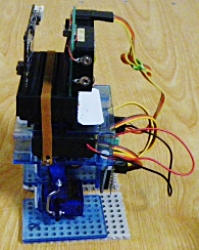
R2.2.14 二足歩行ロボット6
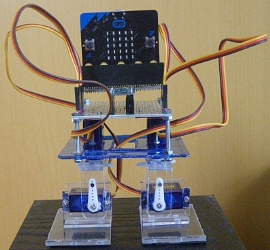
ロボットをもう少しコンパクトにしてみたいと加工し直しました。
修正した点。2足のサーボモーターを2mmボルトで固定しました。そのためにサーボのケーブルを横から出すように変更しました。ロボット用のマイクロビットの電源をCR2032ボタン電池1個にしました。2足の裏に滑り止めを張り付けました。これは、マウスパッドの裏面を利用しました。机にピタッと張り付くゴム様のものを活用。
|
|
|
|
次回があるとしたら、低電圧仕様のサーボモーターで、よりコンパクトにしてみたいと思います。動いている動画をここにアップしています。
上の写真を見て良くわかりますが、工作の精度が一番大切かと思います(当然か)。サーボモーターを取り付けるにしてもモーターのギヤとホーンの受け口が均一にはまりません。それらを固定する外側となる本体工作で左右の足が同等になるような工作をしなければならないようです。足にしても左右の傾き傾斜が同じようになっていなければ歩き方がぎこちなく、場合によっては(動画でも分かるように)直線ではなく曲線を描いて歩くようになってしまいます。もっとも、作って遊ぶ程度であればプログラムで修正可能ですが。
それでも、プログラムも面倒ですね。まあ、少しずつはまともな歩き方ができるようにはなっているようですが、どうでしょう?
そうそう、またBluetooth接続がつながらないで悩んでいます。
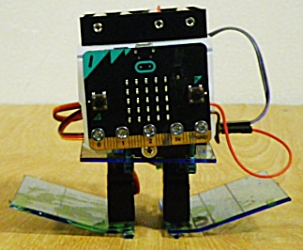
R2.2.7 二足歩行ロボット5
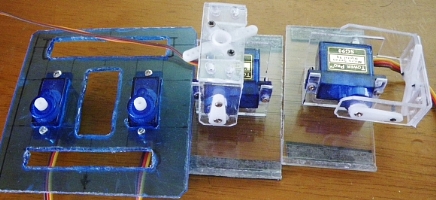
サーボモーターを4個使ったモデルをハード&ソフトとも少々変えました。多少は歩きが良くなったかな? 市販品やベテランさんが作成したモデルとは雲泥の差ですが(^^;) 歩くというのはなかなか難しいものです。子供たちに相談させながらプログラミングさせるのにはうってつけでしょう。ただし、説明用の器具を作って演示したり、子供が手に取って考えられるような模型を用意しておかないと理解は難しいでしょう。
新しく作ったモデルは下の通り。ビデオをここにアップしました。マイクロビットのコントローラを使っています。コントローラの接触や電池の消耗により、結構暴走します(^^;)
 |
 |
 |
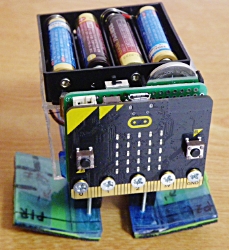
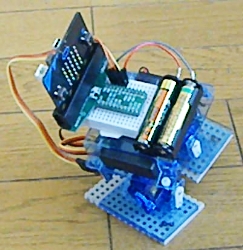
ネットを見ていると、なんとサーボモーター3つで歩かせているモデルがありました。目から鱗! 気が付かないものですね、私のような凡人では。そこで早速製作。作業机の上に散らかっていた材料を使ったので、かなりぼろいロボットになってしまいました。
新しいサーボモーターを10個ゲットしましたが、4.5V以上の電圧が必要だったので、単4電池4本使うことにしました。重くなりますが頭の上に置いて振子の錘にすることにしました。マイクロビットの後ろにサーボを一つ置いて頭部を右に左に振らせて体重移動をさせるのです。頭が重い方が移動しやすいということで。ただ、作っていて分かったことには、高い精度で本体を作ることができれば、僅かな左右の振れでそれは達成できるかなと感じました。マイクロビットの電源は単4電池2本を使います。
 |
 |
足のひらが20度ほどの角度を設けているのがミソで、この斜度によって、本体が左右に振れたときに重心移動が確実となり、反対足が空中に浮いて方向転換できることになるわけです。
4個サーボの本体と同じコントローラーを使えるようにしました。こことここでビデオを見ることができます。相変わらず暴走します(^^;)
今、新たにもっと軽量の2足歩行ロボットを作成中です。10個もサーボモータ買ったので(^^)/
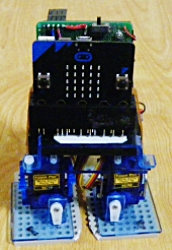
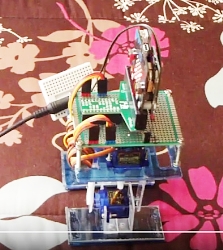
R2.1.30 二足歩行ロボット4
動画から取ったので画質は悪いなぁ。M5Stackでうまく動いた本体をマイクロビットで制御させただけです(^^;) 軽く左に回りながら動くのはM5Stackの時と一緒なので、本体の設計が悪いのだね(^^;)
本体の上に、マイクロビットの電源として単4電池2本、ブレッドボードにさしたマイクロビットを両面テープで仮止め。作っていたキューブコネクタがうまく動作しないのが残念。
 |
動画をここにアップしています。
マイクロビットでサーボをコントロールするには、P0~P2を使えばいいのですが、PCA9685を使ったサーボドライバ基板を使えば16台まで使えるので便利です。拡張機能が用意されているので、すぐに使えます。ただ、サーボドライバ基板に記されている番号は0~15なのだけれど、拡張機能では1~16とずれていることに注意しないといけない。ブロックを組んでいたところ、動きが違った時に初めて気が付いた。我がことながら、「ここきっと間違えるよ」なんて心の中で心配しながら、きっちりと間違えるねぇ(^^;)
H30.12.2 二足歩行ロボット3
電源が安定して一応歩いているように見えるので撮影してyoutubeにアップしてみた。画像をクリックすると見られます。
 |
座布団の上で動かしているのは、足裏に滑り止めとしてマジックテープの片方を張り付けているから。これでも滑っている。足が軽いからかな? サーボに負担がない程度に足の平を重くしてみようか。まだまだ工夫がいる。
サーボを動かす間隔を300ミリ秒あたりより短いと、脚がもつれる感じがする。
H30.12.1 二足歩行ロボット2
それなりにプログラムを作ってみたが、P0、P1、P2までは良かったが、P12を指定してしまって動きがおかしくなった。突然あちこちのサーボモーターが指定した角度以上に動いて、脚がこんがらがった。P12はmicrobit内部の既に使われていて、ユーザーが使ってはいけないようだった。気が付いてP8に変更したが、似たような現象が出た。使っていた単3電池3本の残量がないのかとDC5VのACアダプターを使ったところ、動きが安定した。
けれど、4つのサーボの動きは考えた通りの動きをしているが、二足歩行ロボットは地団駄踏むだけで前進してくれない....
先は長い。
H30.11.27 二足歩行ロボット
何かを作るとき、助かるのが百均のプラスチックケース。今回は、スチロール樹脂のものを選んだ。90度角の部分を利用するためだ。この樹脂は、幸いなことに昔からあったタミヤの接着剤でよくくっ付いた。2枚合わせて半田コテで突き刺してやっても接着するので便利。時に、ポリプロピレン(だったかな?)を選んでしまうと、専用の接着剤が必要で、それもしっかりつかなかったりする。
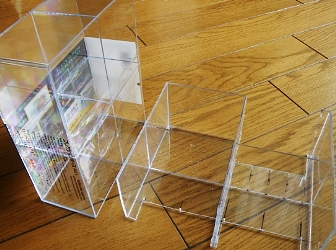 |
青色の板はまた別の素材。クリップボードから切ったもの。こういうものが使えるのでありがたい、百均は。
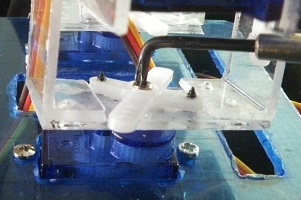
腰回りと、両膝に相当する。下手な組みつけをしたので、サーボモーターに固定するのが難しくなった。ドライバーをこんなふうに曲げ加工して使ってはみたが、今ひとつしっかりと固定されていない。
 |
 |
取り敢えず組み上がった。
 |
さらにマイクロビットも組みつけてみた。傾いているな。サーボモーターのコードがやたら長いので、どうにかしなければならない。
伸ばしたままでも、巻き付けてみても不細工。
 |
 |
最初は、90度・60度・120度の位置を見るために4つのサーボモーターを試運転してみた。モーターの1個が、組みつけ中に空回りしたので、角度がおかしくなっていた。これを直さないといけない。
この動きをみて、次に前進・後退や右・左の動きのプログラムを考えていく。まだまだ先は長い。
