 |
 |
R1.8.9丂婎斅孮偺僔僗僥儉曄峏
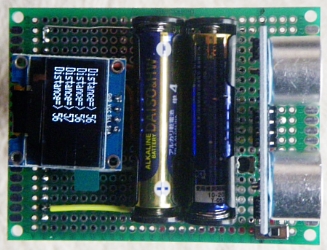
丂挻壒攇偺嫍棧僙儞僒乕傕婎斅孮傪曄峏偟偨丅怴偟偄OLED昞帵斅傪埨壙偵峸擖偟偨偺偱丄偦傟傪棙梡偡傞偙偲偵偟偨丅屆偄婎斅偵敿揷晅偗偟偰偄偨BME280偺庢傝奜偟偑偆傑偔偄偭偨偺偱丄嫍棧僙儞僒乕偺僺儞傕岎姺偟偨丅僙僢僩傪棫偰偨偲偒偵椉栚偑慜傪岦偔傛偆偵偟偨傢偗偩丅攝抲偺娭學偱丄僙儞僒乕偼忋壓傪媡偵偟偰偄傞丅崱夞峸擖偟偨OLED塼徎偼偙傟傑偱偺OLED塼徎偲戝偒偝偼堎側傞偑埖偄偼堦弿側偺偱妝偩丅
|
|
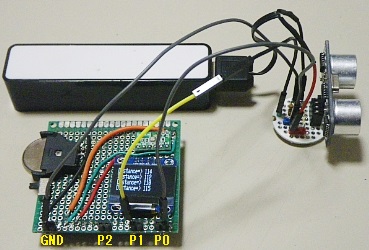
丂儅僀僋儘價僢僩偲偺愙懕偵偼儃儖僩儗僗偵偟丄僄僢僕僐僱僋僞乕偵嵎偟崬傓偩偗偲偟偨丅偙傟偱丄儅僀僋儘價僢僩偺巊偄杺榟偑妝偵側傞丅
 |
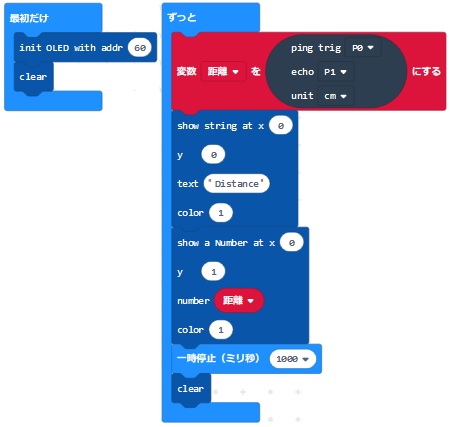
丂婎斅孮偺摦嶌僥僗僩偺堊偵娙扨側僾儘僌儔儉傪彂偄偰傒偨丅奼挘婡擻偼怴偟偄傕偺偵偟偨丅壓偺恾偺塃懁偺奼挘婡擻丅偟偐偟丄傕偆偪傚偭偲尒傗偡偄僼僅儞僩偵側傜側偄傕偺偐丅愢柧偵偁傞偐傕偟傟側偄側丅
 |
 |
丂偲偒偳偒應掕寢壥偑侽偵側傞丅姡揹抮偱偼椡晄懌側偺偐丄侽偵側傞偙偲偑懡偄丅姡揹抮偑屆偔側偭偰偄傞偺偐側丠
H31.3.2丂棊壓塣摦應掕俀
丂應掕奐巒偲廔椆偺帪娫傪應掕偟偰丄應掕偡傞娫妘帪娫傪媮傔偰傒偨丅偦偺偮偳娫妘帪娫偼曄傢偭偰偟傑偆丅昞帵偟偰偄傞僨乕僞偲僌儔僼偼係俉倣倱偺帪偺傕偺丅崱擔弶傔偰傗偭偨帪偵偼俆侽倣倱偲偄偆寁嶼偟傗偡偄寢壥偵側偭偨偑丄嫍棧僨乕僞偑侽懕偒偱偆傑偔庢傟側偐偭偨丅嵟弶偼偳偆傕僟儊側傛偆偩丅壗夞偐僥僗僩應掕偟偨屻丄杮帋尡偲偡傋偒偺傛偆偩丅
 |
丂慜夞乽攝楍偵應掕抣傪擖傟傞張棟乿偲偟偰偄偨偗傟偳丄挻壒攇僙儞僒乕偺張棟偵帪娫偑偐偐傞偺偱偡偹丅俇倣倱傎偳偐偐偭偰偄傞丅侾倣偺嫍棧傪壒攇偑墲暅偡傞偺偵丄2/330昩亖俇倣倱偐偐傞偺偩偐傜偗偭偙偆棊壓暔偑棧傟傞傎偳塭嬁偑戝偒偄偹丅
 |
丂嫍棧偑惍悢抣偱偟偐弌側偄偺偱丄幚尡奐巒捈屻偺僨乕僞偑傾僶僂僩偱偡丅
H31.2.28丂棊壓塣摦應掕
丂棊壓塣摦傪應掕偱偒傞偐側丠丂偲巚偭偰傗偭偰傒偨丅岤庤偱戝偒傔偺嶨帍傪棊偲偟偰丄偦傟傪儅僀僋儘價僢僩偵捛旜偝偣偰傒偨丅
丂應掕抣傪偦偺搒搙昞帵偝偣傞偲丄儅僀僋儘價僢僩偑張棟偱偒側偄偩傠偆偟丄恖娫傕昞帵偑懍偡偓偰婰榐偱偒側偄偺偱丄攝楍曄悢偵擖傟偰偍偔丅偁偲偱嵞惗偝偣偰婰榐偡傞偲偄偆偙偲偵偟偨丅
丂僾儘僌儔儉偼壓偺捠傝丅儃僞儞俙傪墴偟偨傜應掕奐巒偩丅娫妘傪係侽儈儕昩偵偟偰傒偨丅1.2昩傎偳偺應掕偵側傞丅應掕偑廔傢偭偨傜丄俛儃僞儞傪墴偟偰昞帵偝偣偰婰榐偡傞丅俀恖侾慻偵偟偰撉傒忋偘側偑傜僲乕僩偵婰榐偡傞偲妝偵偱偒傞偐側丅
 |
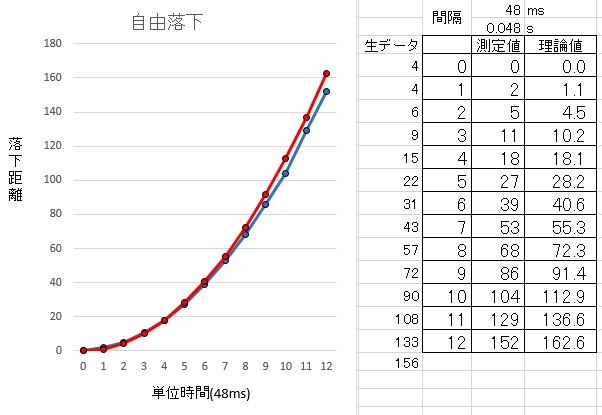
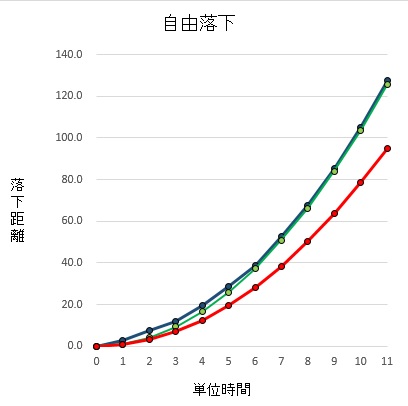
丂僌儔僼張棟偩偑丄僾儘僌儔儉拞偱偼侾丏俆攞偺寁嶼傪偝偣偰偄側偄偺偱丄儚乕僋僔乕僩偱峴偭偨丅惵偺慄偑寢壥丅棊壓嵟弶偺偁偨傝偵岆嵎偺戝偒偝偑尒偊傑偡偹丅堦恖偱傗偭偨傕偺偱擄偟偄丅俀恖側傜偆傑偔偱偒傞偐傕丅
丂愒偺僌儔僼偑棟榑抣偵傛傞僌儔僼側偺偩偑丄戝偒偔偢傟偰偄傑偡偹丅棟榑抣偺應掕娫妘傪係侽儈儕昩偱側偔丄係俇儈儕昩偱寁嶼偡傞偲丄嵶偄椢偺僌儔僼偵側偭偰應掕抣偲廳側傞傛偆偱偡丅幚尡偺應掕娫妘傪壗儈儕昩偵偟偨傜偄偄偺偐専摙偺梋抧偑偁傝傑偡丅
 |
丂幚尡偱堦帪掆巭傪係侽儈儕昩偵偟偰偄傞偗傟偳丄攝楍偵應掕抣傪擖傟傞張棟偵俇儈儕昩傎偳偺帪娫偑偐偐偭偰偄傞偺偐傕偟傟側偄偱偡丅應掕偺奐巒偐傜廔椆傑偱壗儈儕昩偐偐偭偰偄傞偐挷傋偰傕偄偄偱偡偹丅
H31.2.27丂HC-SR04P偱嫍棧傪應掕偡傞俀
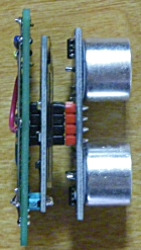
丂傛偆傗偔弨旛偑惍偭偨偺偱丄媥傒偺杮擔惢嶌偵庢傝妡偐偭偨丅憡曄傢傜偢偺峴偒摉偨傝偽偭偨傝偺惢嶌偩偑丄崱夞偼晹昳偺攝抲恾柺傪昤偄偰傒偨丅偗傟偳攝抲偩偗昤偄偰丄攝慄寁夋傪偟側偐偭偨傕傫偩偐傜丄偄偄偐偘傫偵側偭偨丅傑偁丄幨恀傪尒偰傒傟偽暘偐傞偑丄晹昳偺壓偵塀傟偰攝慄偺崿嶨傇傝偼暘偐傜側偄丅
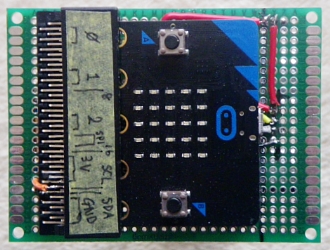
丂儅僀僋儘價僢僩傪嵎偟崬傓僄僢僕僐僱僋僞偼俀侽僺儞亊係楍側偺偩偑丄1.27mm僺僢僠側偺偱偦偺傑傑偱偼2.54mm僺僢僠偺斈梡婎斅偵偼巋偝傜側偄丅偦偙偱丄愭摢偺侾楍俀侽僺儞傪巆偟偰丄懠偼偡傋偰愗傝庢偭偰偟傑偆丅I2C僐僱僋僞偺SCL僺儞偑婎斅忋偐傜偼庢傟側偄偺偱丄幨恀偵偁傞傛偆偵昞偐傜敿揷晅偗偟偰棙梡偟偰偄傞丅
丂堦墳偞偭偲僠僃僢僋偟偰偐傜揹尮傪擖傟偰傒偨傜偟偭偐傝偲嫍棧僨乕僞偑庢傟偰偄傞丅傑偩僾儘僌儔儉偺曄峏偼偟偰偄側偄偑丄昞帵偝傟偰偄傞僨乕僞傪侾丏俆攞偟偰傗傞偲幚嵺偺應掕嫍棧偲側傞丅
 |
 |
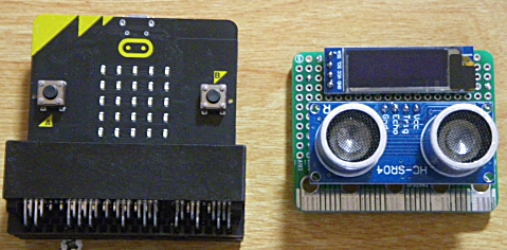
丂墶偐傜嶣塭偟偨傜丄俀偮偺栚嬍偑偄偄姶偠偵儘儃僢僩晽偵側偭偰偄傞丅儘儃僢僩偵敪揥偝偣偨偄側丅
 |
丂崱夞偼丄俇們倣亊俉們倣偺婎斅乮SODIAL(R) 5倶6x8cm僟僽儖僒僀僪僾儘僩僞僀僾PCB儐僯僶乕僒儖僾儕儞僩婎斅丗撏偔偺偑抶偔側傞偗傟偳巊偄傗偡偔儅僀僋儘價僢僩偵偼挌搙偄偄戝偒偝乯傪愗傜偢偵巊偭偨丅僐儞僷僋僩偵傕偱偒傞偩傠偆偑丄攝慄偟傗偡偝傪桪愭偟偨偺偩偭偨丅偦傟偱傕嬯楯偟偰偟傑偭偨偗偳丂(^^;)
H31.2.17丂HC-SR04P偱嫍棧傪應掕偡傞
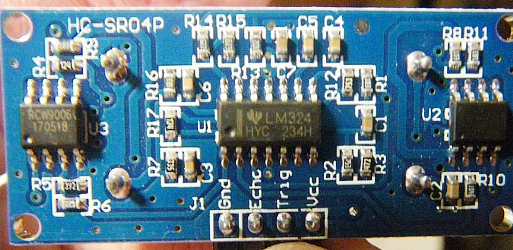
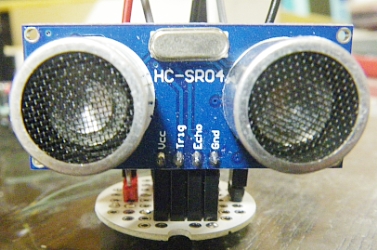
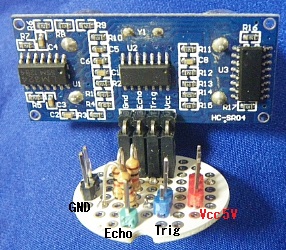
丂3倁乣挻壒攇嫍棧應掕儌僕儏乕儖傪傾僀僥儞僪乕偝傫偐傜峸擖偟偨丅亸俁俋侽偩偭偨丅埲慜偐傜帩偭偰偄傞俆倁斉偲斾傋傞偲丄椉栚偺娫偺僋儕僗僞儖偑側偔側偭偰偄傞丅棤懁偺俁偮偺僠僢僾偺拞偺偆偪倀俀偐倀俁偺拞偵曄傢傞傕偺偑擖偭偰偄傞偺偩傠偆偐丅
 |
 |
丂俁倁偱摦嶌偝偣傞偺偱丄echo偐傜擖偭偰偔傞怣崋揹埑傕俁倁埲撪偱栠偭偰偔傞偩傠偆偐傜丄儅僀僋儘價僢僩偺抂巕偵偦偺傑傑擖傟偰峔傢側偄偩傠偆丅
丂敿揷偑側偔側偭偰偟傑偭偨偺偱丄庢傝姼偊偢偮側偄偱傒偨丅嵟弶偼僨乕僞偑侽偲偟偐昞帵偝傟側偐偭偨偑丄儃僞儞揹抮偺揹埑偑崀壓偟偰偄傞偐側偲巚偄丄僷僜僐儞偺倀俽俛偐傜揹尮傪庢偭偰傒傞偲丄壥偨偟偰應掕抣偑尰傟偰偒偨丅
 |
丂俆倁傪巊傢側偔偰偄偄偺偱丄偙傟偼曋棙偩偹丅敿揷傪攦偭偰丄拲暥偟偰偄傞婎斅偑撏偄偨傜丄儃僞儞揹抮偱側偔偰扨係揹抮俀杮偱巊偆婎斅傪嶌偭偰傒傛偆丅
H30.12.23丂嫍棧傪應掕偡傞
丂偳偆偄偆傢偗偐儔僘僷僀偺儁乕僕偵HC-SR04偲偄偆挻壒攇嫍棧寁偺岺嶌偑柍偔側偭偰偄傞偑丄巊偭偰偼偄偨丅偐側傝娙扨偵巊偊偨丅偦傟傕偡傋偰巊偄曽傪岞奐偟偰偔傟偰偄傞曽乆偺偍堿側偺偩丅
丂儅僀僋儘價僢僩偱傕巊偊傞丅偨偩丄HC-SR04偼俆倁偱摦嶌偡傞乮嶐擔儅僀僋儘價僢僩偵捈寢偡傞俁倁摦嶌偺傕偺傪亸俀侽侽侽庛偱敪尒偟偨乯偺偱丄庒姳偺岺嶌傪偟偰偮側偄偱傒偨丅梋偭偰偄偨儁僢僩儃僩儖僉儍僢僾婎斅傪巊偭偨丅
 |
 |
丂侾俲兌偺掞峈傪俀杮暲楍偵偟偰俆侽侽兌偲偟Echo偵偮側偘傞丅傕偆侾偮偺侾俲兌傪俧俶俢偲Echo偺娫偵擖傟偰丄儅僀僋儘價僢僩偵擖偭偰偔傞怣崋揹埑傪壓偘偰偄傞丠両傜偟偄丅傛偔傢偐傜傫偗偳丅徻偟偄偙偲偼僱僢僩偱傕挷傋偰偔偩偝偄丅
丂偦傟傪丄儅僀僋儘價僢僩偵偮側偖丅俆倁偺揹尮偼昐嬒偺俁侽侽墌儌僶僀儖僶僢僥儕乕丅
 |
丂僾儘僌儔儉偼丄pxt-sonar 0.0.5 (Microsoft/pxt-sonar)傪棙梡偟偨丅偙偺僷僢働乕僕偼windows10偱偼尒偮偐傜側偐偭偨偺偱丄僽儔僂僓斉偱巊偭偨丅堦墳應掕偼偱偒傞偺偩偗傟偳丄幚嵺偲戝偒側堘偄偑惗偠傞丅壓偺恾偱悈怓偺僌儔僼偑應掕偟偨傕偺丅僱僢僩偱傕偦傫側偙偲偑婰帠偵側偭偰偄偨丅
 |
丂偦偺廋惓偼丄應掕抣傪侾丏俆攞偡傟偽偄偄偩偗偺傛偆側偺偱丄崱屻峴偆偙偲偵偡傞丅偲傕偐偔丄嫍棧應掕偑偱偒偰丄彫偝側LCD儌僕儏乕儖偵昞帵偡傞偙偲偑偱偒偨丅
