 |
 |
 |
俫俁侽丏俁丏侾俆
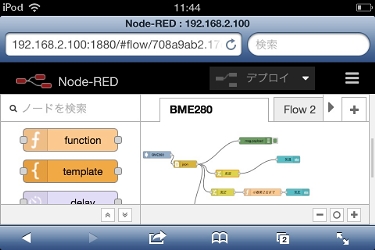
丂儖乕僞乕傪婲摦偟偰丄庢傝偁偊偢儔僘僷僀偩偗偮側偄偱偍偔丅iPodToutch傪偙偺儖乕僞乕偵愙懕偟偰傗傞偲丄NodeRed偱嶌惉偟偨儔僘僷僀偺BME280夋柺傪尒傞偙偲偑偱偒傞丅僌儔僼傪嵹偣偰偟傑偆偲屌傑傞傛偆偵側偭偨偺偱丄悢抣偩偗偵偟偰傒偨丅偡傞偲丄崗乆偲曄傢傞婥徾梫慺偑iPodTouch偱傕尒傞偙偲偑偱偒偨丅
|
|
|
丂壗偐栶偵棫偨側偄偐側丠>P> 丂僼儘乕夋柺傕尒傞偙偲偑偱偒偨偗傟偳丄偙傟偭偰丄憖嶌偼偱偒側偄傛偹丠両丂偱偒偨偲偟偰傕丄偲偰傕偲偰傕夋柺偑彫偝偔偰埖偊側偄偗偳丅
 |
俫俁侽丏侾丏俀係
丂曣娡俹俠偐傜柍慄倂俬俥俬偱儔僘僷僀偺僨僗僋僩僢僾傪僐儞僩儘乕儖偡傞偙偲偑偱偒傞丅儔僘僷僀偵僀儞僗僩乕儖偝傟偰偄傞Scratch傪曣娡俹俠偐傜摦偐偡偙偲偑偱偒傞偲偄偆偙偲偩丅
丂Scratch偱僾儘僌儔儈儞僌偡傞偙偲偱丄儔僘僷僀偺GPIO傪捠偟偰儌乕僞乕傪惂屼偱偒傞偺偱丄曣娡俹俠偐傜儔僘僷僀搵嵹偺幵傪巚偆捠傝偺摦偒傪偝偣傞偙偲偑偱偒傞偙偲偵側傞丅
丂壠掚撪偱偁傟偽僀儞僞乕僱僢僩偵偮側偑傞僱僢僩儚乕僋偑偱偒偰偄傞偺偱丄倁俶俠傪棙梡偟偰曣娡俹俠偲儔僘僷僀偼娙扨偵偮側偑偭偨丅偗傟偳丄嬑柋愭傗妛峑側偳偱偼彑庤偵僱僢僩儚乕僋偵擖傞偙偲偑偱偒側偄偺偱丄娙扨偵儔僘僷僀傪僱僢僩儚乕僋愙懕偡傞偙偲偼偱偒側偄丅
丂偦偙偱丄応強傪慖偽偡曣娡俹俠偲儔僘僷僀傪愙懕偟傛偆偲帋傒偨丅偗傟偳丄搆楯偵廔傢偭偨丅
丂嵟弶偵丄愄偐傜偁傞曽朄乮俢俷俽偺帪戙偵傗偭偨傛偆側...乯偺傾僪儂僢僋愙懕傪帋傒偨丅僱僢僩偵偼偄傠偄傠側忣曬偑偁偭偨偑丄偙傠偙傠曄傢傞儔僘僷僀偺俷俽偺僶乕僕儑儞偵傛偭偰丄偳偆傕愝掕偺曽朄偑偝傑偞傑偵側偭偰偟傑偭偰偄傞丅巹偺儔僘僷僀偼stretch側偺偩丅傑偨丄windows偩偭偨傝俵俙俠偩偭偨傝偡傞愢柧偲偄偆偙偲偱偺栤戣傕偁傞丅側偐側偐擄偟偄丅
丂儔僘僷僀傪傾僋僙僗億僀儞僩偵偟偰偟傑偆偲偄偆庤傕帋傒偨丅傾僋僙僗億僀儞僩偵側偭偨偐傜偲偄偭偰倁俶俠偱儔僘僷僀傪僐儞僩儘乕儖偱偒傞偐偼晄柧偩偭偨偺偩偗傟偳丅偙傟傕丄傾僪儂僢僋偺帪偲摨條偺棟桼偱忋庤偔偄偐側偐偭偨丅偨偩丄俀搙傎偳曣娡俹俠偐傜丄傾僋僙僗億僀儞僩偵側偭偨儔僘僷僀傪尒傞偙偲偑偱偒偨丅偟偐偟丄偦偺傾僋僙僗億僀儞僩偵偮側偑傜側偐偭偨丅僱僢僩儚乕僋娭學偵偮偄偰偺棟夝晄懌偩偹丅
丂掹傔偐偗偨偺偩偑丄傆偲乽壠掚撪偺儘乕僇儖僱僢僩儚乕僋偑儖乕僞乕傪巊偭偰偱偒傞偺偩偐傜丄儔僘僷僀偲曣娡俹俠偩偗偺僱僢僩儚乕僋傪儖乕僞乕傪巊偭偰嶌傟偽偄偄偺偠傖側偄偐丠丠乿偲偄偆偙偲偵傂傜傔偄偨丅仼丂抶偄偹(^^;)
丂壠掚梡偺僀儞僞乕僱僢僩偵傾僋僙僗偟偰偄傞儖乕僞乕偺働乕僽儖傪堷偒敳偔偙偲偑偱偒側偐偭偨丠偺偱丄埨偄儖乕僞乕傪拲暥偡傞偙偲偵偟偨丅
丂撏偄偨偺偱憗懍帋偟偰傒偨丅
丂儖乕僞乕偵揹尮傪擖傟偰傒傞丅儔僘僷僀偱扵偟偰傒傞偲偪傖傫偲偁傞両丂摉偨傝慜偐丅曣娡偱傕擣幆偱偒傞偟丄側偵偐椉幰偼偮側偑偭偨柾條両
丂椉曽偑偮側偑偭偨忬懺偱丄儔僘僷僀偺倁俶俠僒乕僶乕偱傾僪儗僗傪妋擣偡傞丅曣娡偺倁俶俠價儏乕儚乕偵偦偺傾僪儗僗傪擖傟偰傒傞偲丄尒偊偨両
丂奜偺僀儞僞乕僱僢僩儚乕僋偵偮側偖昁梫偑側偄偺偱偙傟偱姰椆丅偙偺儖乕僞乕俆倁俀丏俋倂偲偁傞偺偱丄儌僶僀儖僶僢僥儕乕偱傕塣梡偱偒偦偆偩偟丅偙傟偱丄嶳栰偺偳偙偱傕妶梡偑偱偒傞丅
丂椉幰偼偮側偑偭偰偄傞偺偱丄倁俶俠宱桼偱僼傽僀儖岎姺傕偱偒偨丅柺搢側憖嶌偩偗偳丅嫟桳僼僅儖僟傪愝掕偡傟偽傕偭偲娙扨偵偱偒傞偐側丅
俫俁侽丏侾丏侾俈
丂RaspberryPi_ZERO_W偺OS偵偼Stretch傪擖傟偰偁傞丅僱僢僩偵偁偭偨乽帺摦婲摦偺俆偮偺曽朄乿偲偄偆婰帠偵偁偭偨俆偮偺曽朄傪幚峴偟偨偑丄幚偼忋庤偔摦偐側偐偭偨丅Rasbian偼Jessie埲崀偺帺摦婲摦偼丄systemd傪巊偆偲偄偆偙偲傪僱僢僩偺偳偙偐偱尒偨偙偲傕偁傝丄偠偭偔傝庢傝慻傫偩偑偙傟傕偩傔偩偭偨丅帺暘偺棟夝椡偺庛偝偵傔偘傞丅
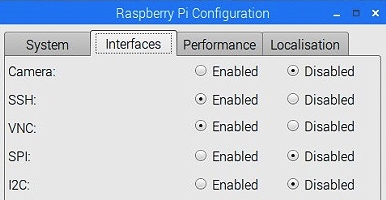
丂傆偲栚偵偟偨RaspberryPi偺Configuration丅Interface偺僞僽傪奐偄偨傜丄VNC偺崁栚偑偁偭偰丄Disable偵儅乕僋偝傟偰偄傞偱偼側偄偐丅偦偆偄偊偽丄怴偟偄raspbian偵偼VNC偑擖偭偰偄傞偲偄偆婰帠傕尒偨傛偆側婥偑偡傞丅
丂Enable偵儅乕僋偟偰嵞婲摦偡傞偲丄側傫偲曣娡偲偮側偑偭偨丅曣娡俹俠偵ZERO_W偺夋柺偑弌偰偒偨偺偩丅偗傟偳丄抶偄両
 |
丂寢壥偲偟偰幚峴偱偒偨偺偩偑丄偁傟偙傟偲俆偮偺曽朄傪帋偟偰偄傞偺偱丄configuration偺Enable傪儅乕僋偟偨偙偲偺懠偵丄偳偺庤抜偑懨摉偩偭偨偺偐偑晄柧側傑傑偩丅
丂偄偢傟偵偟偰傕丄曣娡偱ZERO_W傪僐儞僩儘乕儖偱偒偨偙偲偼婐偟偄丅偟偐偟丄憖嶌偵懳偡傞斀墳偑抶偄丅偙傟偼ZERO_W偩偐傜側偺偐丅 丂曣娡偐傜ZERO_W偺Scratch傪婲摦偟偰帠慜偵嶌偭偰偍偄偨僾儘僌儔儉僼傽僀儖傪屇傃弌偟偰幚峴偡傞偲丄摉偨傝慜偺偙偲偩偑丄偦偺捠傝偵幵偼摦偄偨(^^)/ 丂偦偙偱丄VNC偵娭偟偰偼柍岰偺Pi3偱傕傗偭偰傒偨丅偡傞偲丄Stretch偵偼RealVNC偺儌僕儏乕儖偑僾儕僀儞僗僩乕儖偟偰偄傞偺偱丄僒乕僶乕偺僒乕價僗傪擖傟偰偁偘傟偽偡偖偵倁俶俠僒乕僶壔偡傞傜偟偄乮僾儘僌儔儉偼僀儞僗僩乕儖偟側偗傟偽偄偗側偄乯偙偲偑暘偐偭偰帋偟偰傒偨偲偙傠丄枮懌偡傞僗僺乕僪偱曣娡偵夋柺偑暋惢偝傟偰偮側偑偭偨丅
RealVNC偺僒乕僶乕傪僀儞僗僩乕儖偡傞
丂sudo apt-get install realvnc-vnc-server
僞僗僋僶乕偺儔僘儀儕乕傾僀僐儞MENU偐傜愝掕亅RaspberryPi偺愝掕亅僀儞僞乕僼僃乕僗VNC偱桳岠偵偡傞偲儔僘僷僀婲摦帪偺僒乕價僗帺摦婲摦愝掕傑偱偝傟傞丅
丂僀儞僗僩乕儖偡傞偲僞僗僋僶乕偵弌偰偔傞RealVNC傾僀僐儞傪僋儕僢僋偱昞帵偝傟傞傾僪儗僗傪曣娡偺VNC價儏乕儚乕偱擖椡偡傟偽丄傾僋僙僗偱偒傞傛偆偵側傞丅偨偩丄VNC價儏乕儚乕傕RealVNC偺傕偺偱側偔偰偼偄偗側偄丅曣娡偵巆偭偰偄偨慜偺價儏乕儚乕偱偼傾僋僙僗偱偒側偐偭偨丅
丂幵偺塣摦忬懺偩偑丄夋柺偵棆儅乕僋偑弌側偄偺偱丄儌乕僞乕俀偮偲WIFI丄僫僲儃乕僪傗杮懱側偳偺揹椡傪丄昐嬒偱峸擖偟偨俁侽侽墌偺儌僶僀儖僶僢僥儕乕偼椡傪敪婗偟偰偄傞偲偄偆偙偲偩丅偁傝偑偨偄丅
偙偙偱摦夋偑尒傟傞丅Scratch偺僾儘僌儔儉偼壓恾偺捠傝丅偨偩偟丄乽侾昩懸偮乿偱側偔丄乽0.5昩懸偮乿傎偳偵偟偨偲巚偆丅懸偪帪娫偺挷惍偱恀巐妏偵摦偔偙偲偑偱偒傞偐傕偟傟側偄丅
 |
丂偨偩丄摦偐偟偰傒偰丄幵偺幵椫偺屌掕偵晄埨偑巆偭偨丅彫偝側價僗侾偮偱偼婥偑偐傝偩丅嵶偔偰傕儃儖僩巭傔偑揔愗偐丅傑偨丄幵懱偵儌乕僞乕傪庢傝晅偗偰偄傞晹暘偑丄愙拝嵻偱庢傝晅偗偨傕偺側偺偱庛偦偆偩丅偙傟傕俀杮偺儃儖僩偱棷傔偰傒偨偄丅
丂巕偳傕偑埖偆偲偟偨傜丄傕偆彮偟嫮搙傪忋偘傞昁梫偑偁傞偐傜偹丅
丂儌僶僀儖僶僢僥儕乕偑巊偊傞側傜丄師偺僗僥僢僾偲偟偰丄僒乕儃儌乕僞乕傪俀屄巊偭偰僐儞僩儘乕儖偡傞幵傪寁夋偟偰傒傛偆偲巚偆丅
